The Idea
What is it about?
Automated electric vehicles will be a key element to manage challenges, which emerge from increasing needs of mobility and urbanization. They will create the basis for a sustainable and intelligent road traffic, new mobility and transport concepts as well as improvements of traffic safety and quality of life in urban areas.
![[Foto: Prof. Dr. Lutz Eckstein]](/images/personen/eckstein-lutz-200x200.jpg)
Prof. Dr. Lutz Eckstein
RWTH Aachen University - ika
„In UNICARagil, we succeeded for the first time in combining the research-strongest German universities in automated and electric driving as well as selected, highly innovative companies in one project consortium. With the support of the BMBF, we want to make a significant and sustainable contribution to ensuring that future generations of automobiles in Germany will also be born."
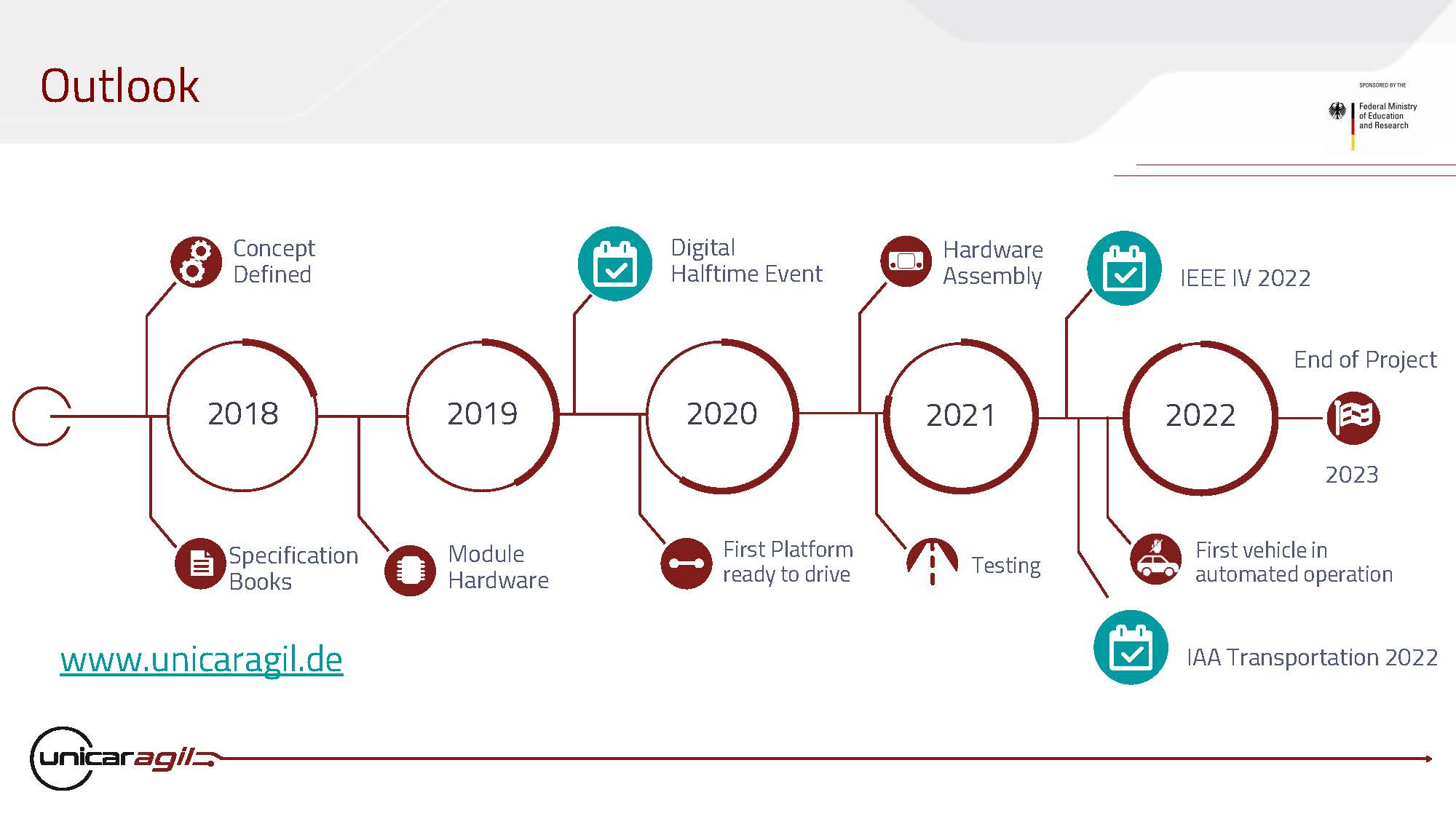
2018 – 2023
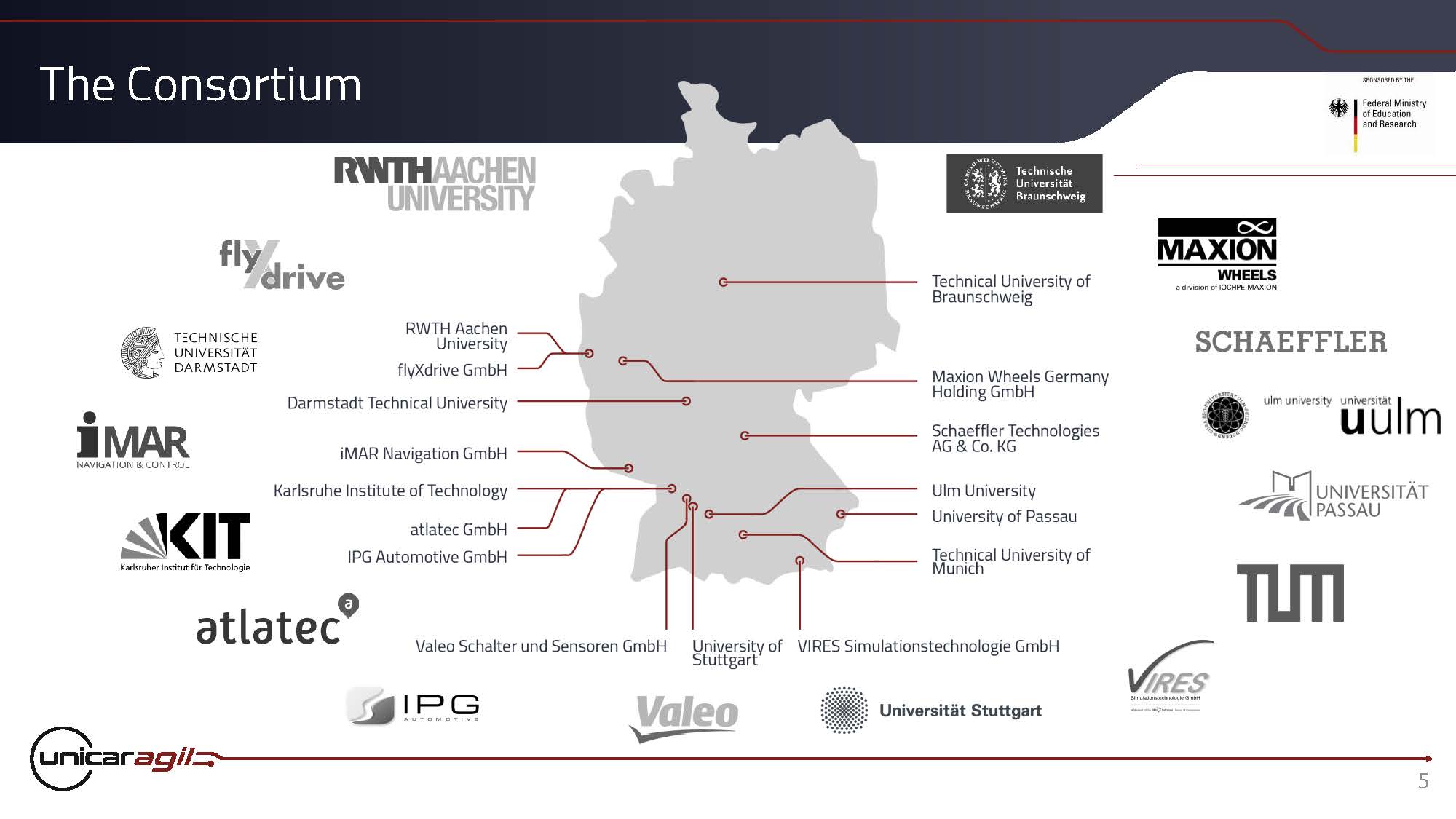
15 Chairs at
8 Universities
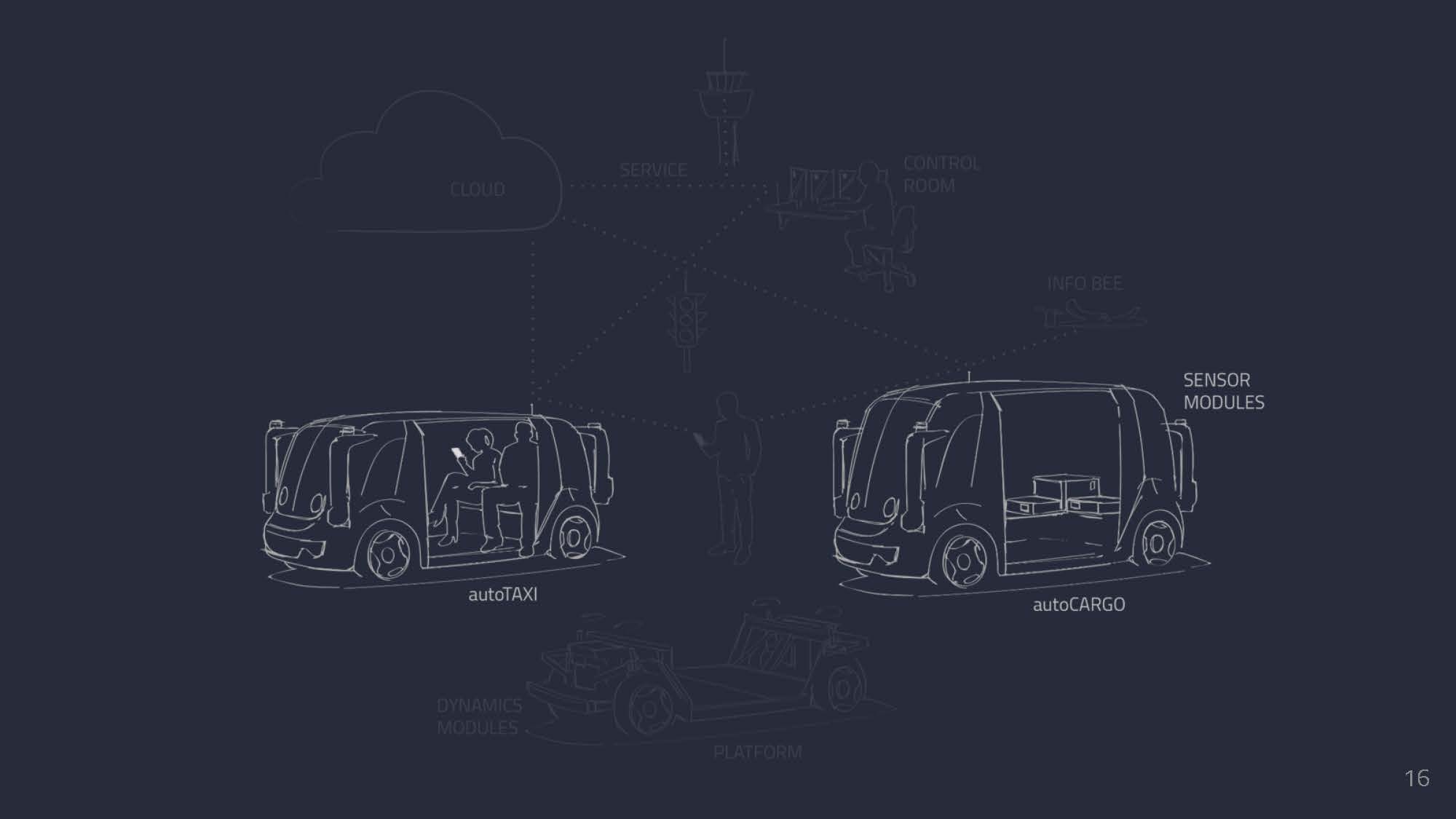
In the UNICARagil project, fully driverless electric vehicles will be developed based on the latest results of research into automated and connected driving and electric mobility. The basis for this is a vehicle concept, which is made up of an add-on Modules and platform. It should be able to fit flexibly to a wide range of different applications in logistics and passenger transport - especially in scenarios in which the use of driverless, emission-free vehicles makes sense.
![[Bild: UNICAR<em>agil</em> Autos]](/images/medien/bilder/Familie/UNICAR_Familie.webp)
8 Industrial Partners, including 4 KMU
Rd. 32 MIO. €
BMBF funding
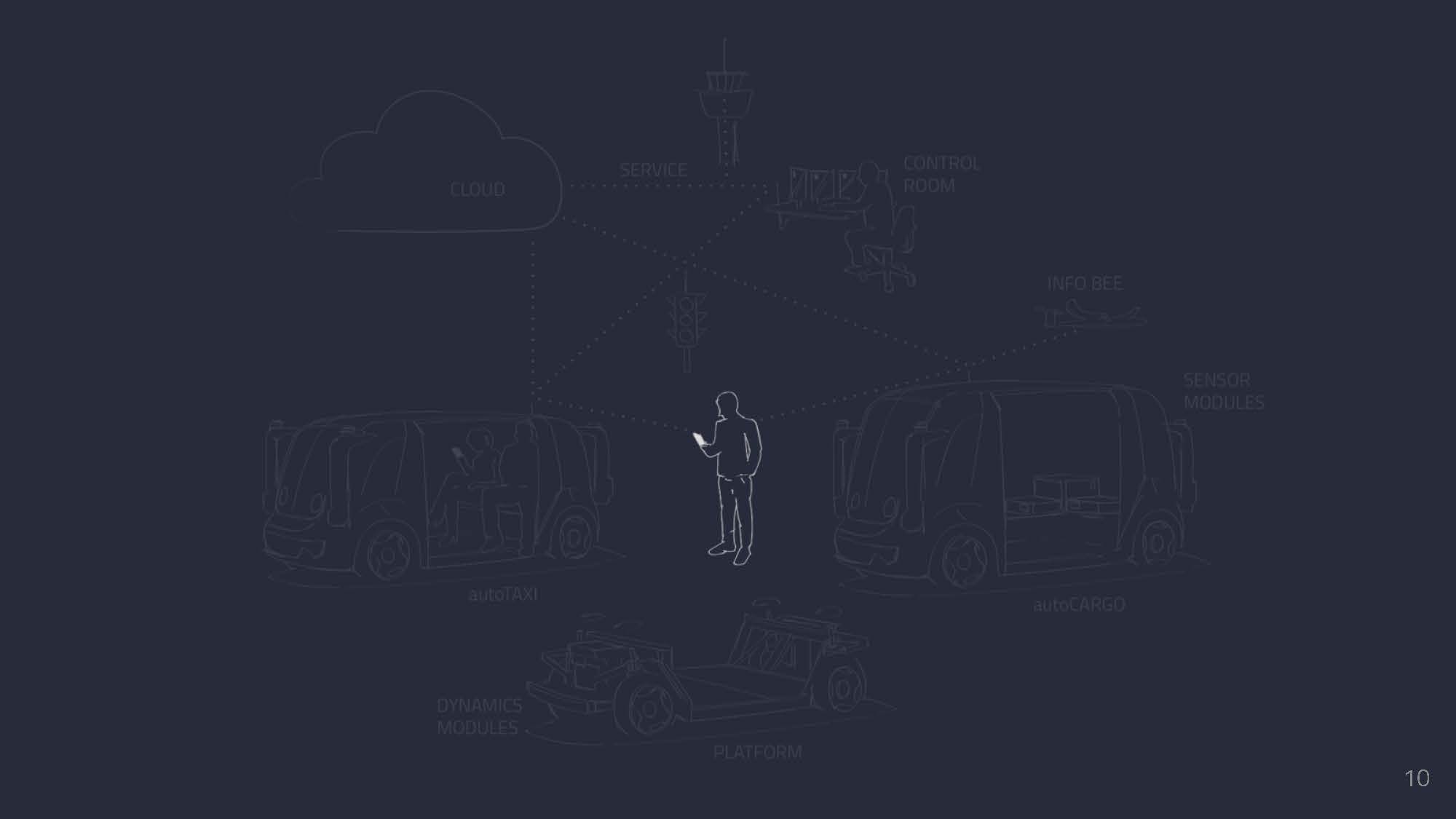
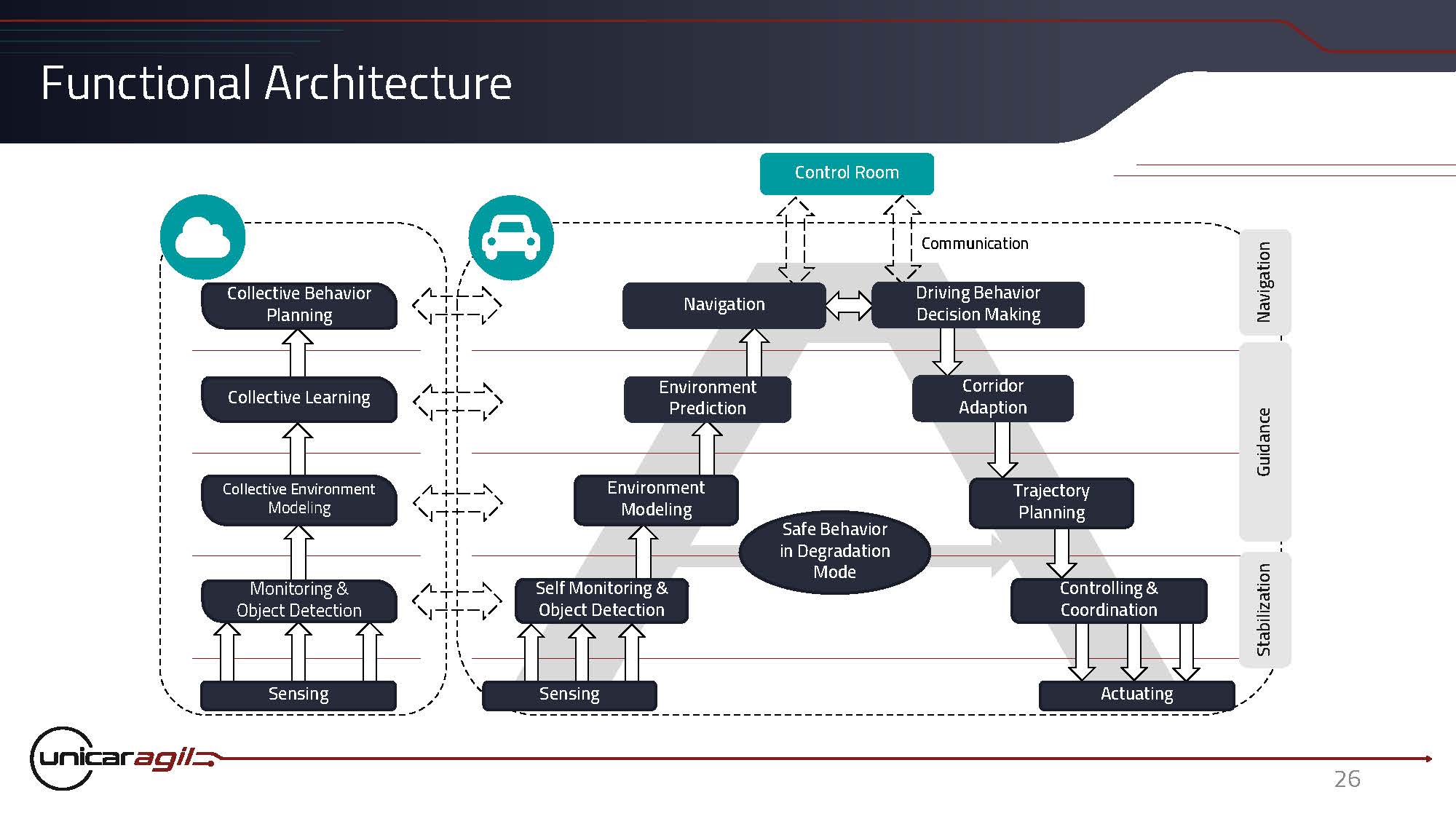
The main element of the research and development work is the functional vehicle architecture, which is connected with the cloud, the road infrastructure and a sensor drone. Further main focuses are the development of generically designed sensor modules for environment perception, a flexibly extendable and updatable software and hardware architecture as well as highly agile wheel drives. They allow completely new movement forms in traffic and make UNICARagil vehicles particularly agil. The demonstration of four different applications on test fields in Germany completes the project.
![[Bild: UNICAR<em>agil</em> Timeline]](/images/timeline-en.svg)
Four Vehicles
fully automated
and driverless
Because of the funding from the Federal Ministry of Education and Research with over € 32 million Euros, eight of Germany's leading universities in the field of automated driving incorporat with eight eight selected companies from industry to conform to the project’s goals.
The project started in March 2018 and received a great response from the public as well as press. In the following five years, 258 partial work packages will be processed to develop and construct four fully automated and driverless vehicles and their innovative architectures.
![[Foto: Timo Woopen]](/images/personen/woopen-timo-2-200x200.jpg)
Timo Woopen
RWTH Aachen University - ika
„UNICARagil is unique! More than 100 scientists from 23 different partners are working together on one mission: Creating tomorrow's mobility. Thanks to the support of the BMBF, for the first time the most diverse research areas can work cooperationally and highly agile on new concepts for automated and electric driving. I am happy to be a part of this unique team!“
UNICARagil is supported in the research focus “Disruptive Fahrzeugkonzepte für die autonome elektrische Mobilität (Auto-Dis)“ in the program „Mikroelektronik aus Deutschland – Innovationstreiber der Digitalisierung“. It is the aim to promote innovations for the fully automated driving of the future (Stage 5) that can exceed the evolutionary further development of automobility:
"Disruptive" vehicle concepts that combine the latest technologies in the fields of electrification and automation and can create the basis for intelligent mobility, more sharing, innovative business models and services are at the centre of attention.
The project offers the opportunity for a wide range of innovations in the components and systems for automated electric vehicles as well as the implementation of automated driving functions. UNICARagil makes a substantial contribution to increasing Germany's innovative power in automated electric driving. Furthermore, interdisciplinary research, development and teaching at several research locations in Germany will be integrated and intensified in the project.
Main Focus
User Centricity
User Centricity
![[Image: UNICARagil User Centricity]](/images/kerninnovationen/uncr-nutzerorientierung.png)
A user-oriented implementation of innovative technologies puts people at the center of the development of future mobility systems.
People’s needs are the main motivation of the UNICARagil vehicles. This is achieved by a user-centric vehicle development including user surveys (needs/demand analysis), expert and subject studies (co-creation) as well as virtual validation.
From app-based mobile booking to disembarking after the ride - an end-to-end digital interaction concept creates a convenient user experience and allows customers to devote themselves to other activities during the ride. The inclusive overall concept enables everyone to participate in the automated mobility of the future.
Modularization
Modularization
![[Image: UNICARagil Modularization]](/images/kerninnovationen/uncr-modularisierung.png)
Consequent modularization creates flexibility in the application of automated vehicles.
Based on a modular structural kit, vehicles can be realized for a wide range of use cases - e.g. for local public transport, mobility-on-demand, freight transport or personal individual mobility. The sensor modules developed for environment detection can be flexibly equipped with or without redundancy as required. Software modules can be flexibly exchanged and updated thanks to the Automotive Service-oriented Software Architecture.
Consequent separation of automation functions, e.g. motion planning and control, enables the vehicle to be controlled by various services - such as a teleoperator in the control room or the Safe Halt fallback level.
The integration of drive, steering and chassis into a 48-V-based dynamics module enables disruptive vehicle designs as well as easy maintenance and updateability.
Electronic Architectures
Electronic Architectures
![[Image: UNICARagil Electronic Architectures]](/images/kerninnovationen/uncr-elektronik-architekturen.png)
Innovative hardware architectures in the electronic system enable implementation of efficient and safe control units.
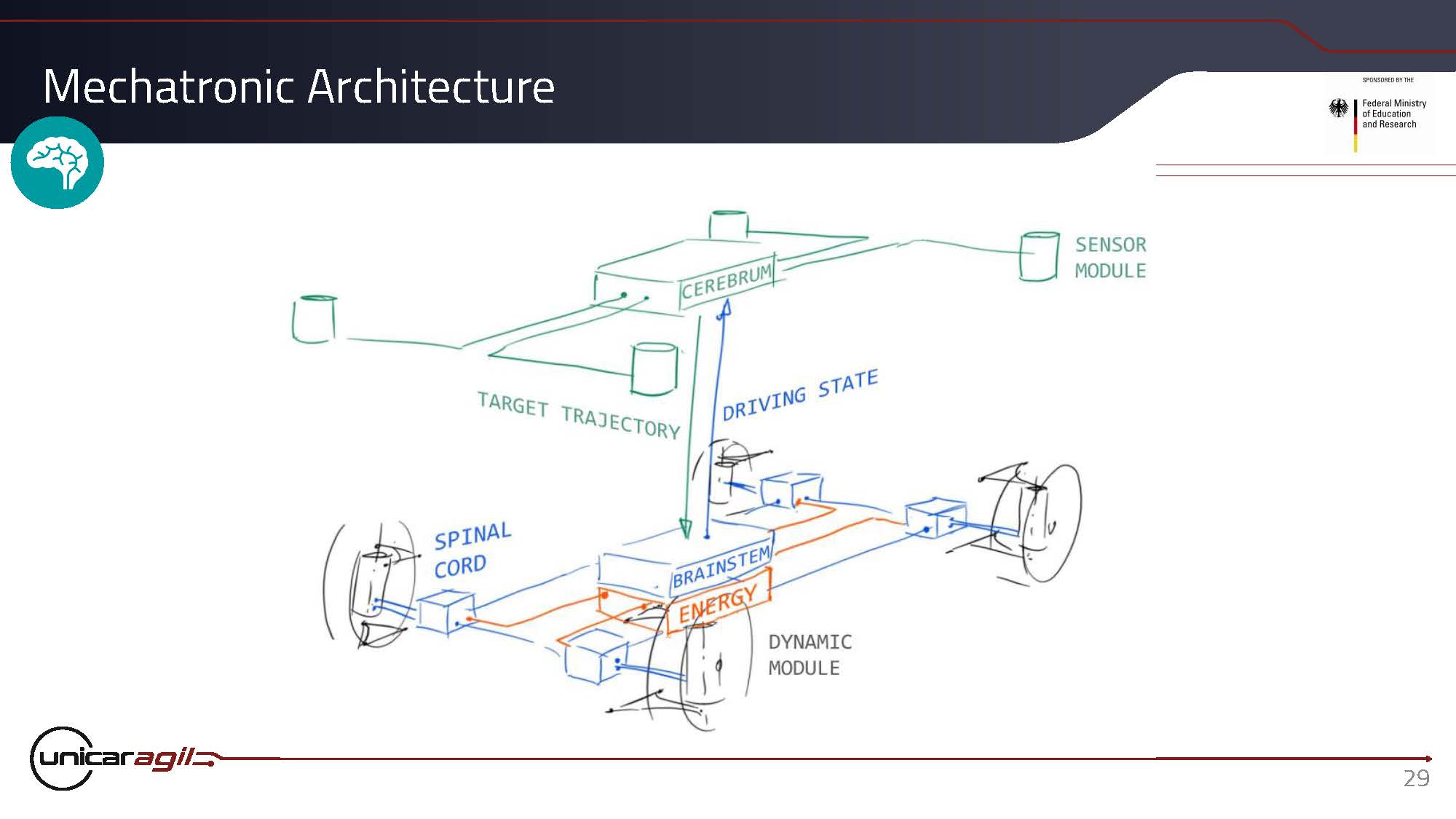
Inspired by the human nervous system, a bionic E/E architecture is being developed in which software modules can be distributed according to requirements to the control units called cerebrum, brain stem and spinal cord - both specially developed embedded systems as well as high-performance computers. This allows the fulfillment of different needs for real-time capability, computing power and security, distinguishing UNICARagil from other players relying on a central computing unit.
The control units communicate with each other via a common Ethernet network, which is the basis for the widespread use of a service-oriented software architecture. In addition, the chosen four-zone architecture ensures high availability of the power and communication connections of all hardware components, so that safe operation of the vehicles is always possible.




Automotive SOA
Automotive Service-oriented Software Architecture (ASOA)
![[Image: UNICARagil Automotive Service-oriented Software Architecture]](/images/kerninnovationen/uncr-automotive-soa.png)
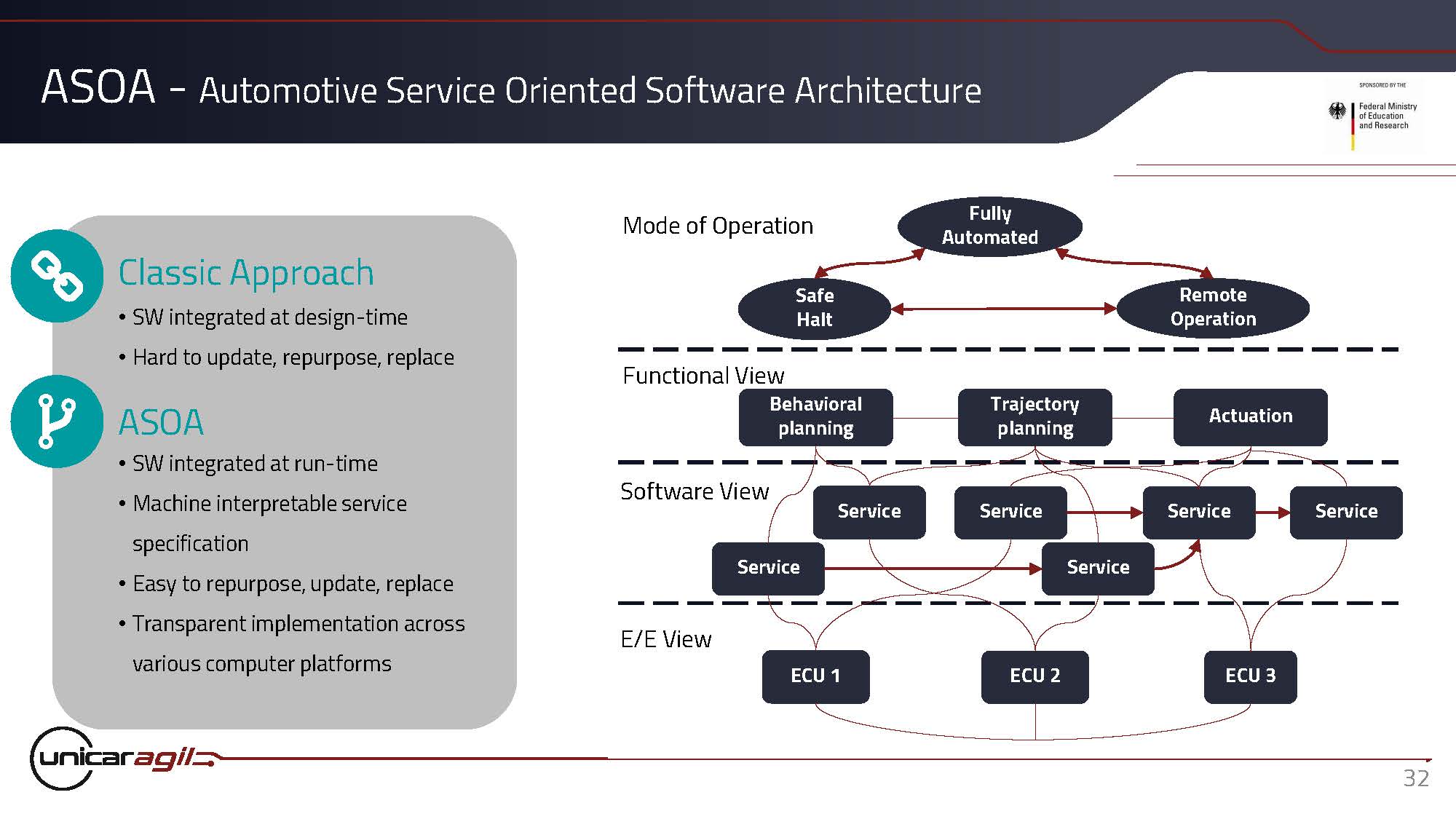
The Automotive Service-oriented Software Architecture (ASOA) creates the basis for updateable software in the electronics system for automated driving.
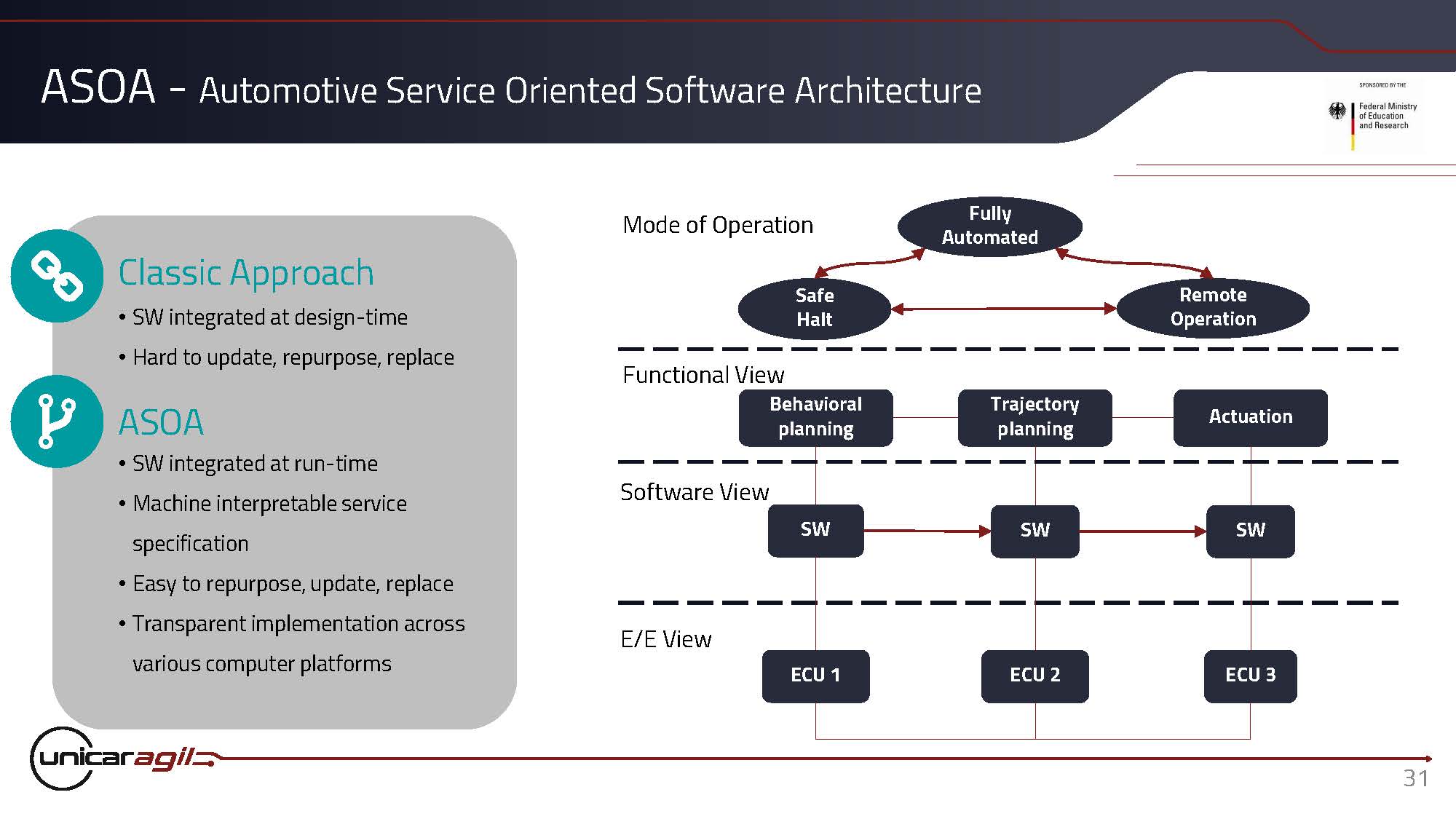
The Automotive Service-oriented Software Architecture (ASOA) creates the basis for updateable software in the electronics system for automated driving. An increasing complexity of the software implemented in automated vehicles requires the possibility to easily exchange and update software components. The ASOA implements a modular software concept that enables the execution of software services in a distributed system on heterogeneous computing units - embedded systems as well as high-performance computers. For example, teleoperation by the control room requires a different service composition than regular automated operation. The required reconfiguration of the software during operation is possible with the ASOA. This also enables easy extension and adaptation for future purposes.
Control Room & Cloud
Control Room & Cloud
![[Image: UNICARagil Control Room & Cloud]](/images/kerninnovationen/uncr-leitwarte-cloud.png)
Cooperative and collective functions in the cloud support vehicle automation. Monitoring by the control room ensures constant availability.
Passenger confidence in the driverless vehicles must be guaranteed at all times. For this reason, the service personnel in the control room are available around the clock. If necessary, the vehicle can be brought to a halt at a safe location at any time and vehicle control can be taken over by a teleoperator. This ensures constant availability and extends the vehicles' area of operation.
Shared environment perception in the cloud enables cooperation between the automated vehicles. The Info Bee, a sensor-carrying drone, provides additional information from the air when it is needed. This allows a virtual foresight. We want our vehicles to get better and better: A collective collection of data in the cloud can be used to continuously analyze and improve algorithms.
Safety & Security by Design
Safety & Security by Design
![[Image: UNICARagil Safety & Security by Design]](/images/kerninnovationen/uncr-safety-security.jpg)
Safety & Security by Design: Consistent safety orientation from idea to release
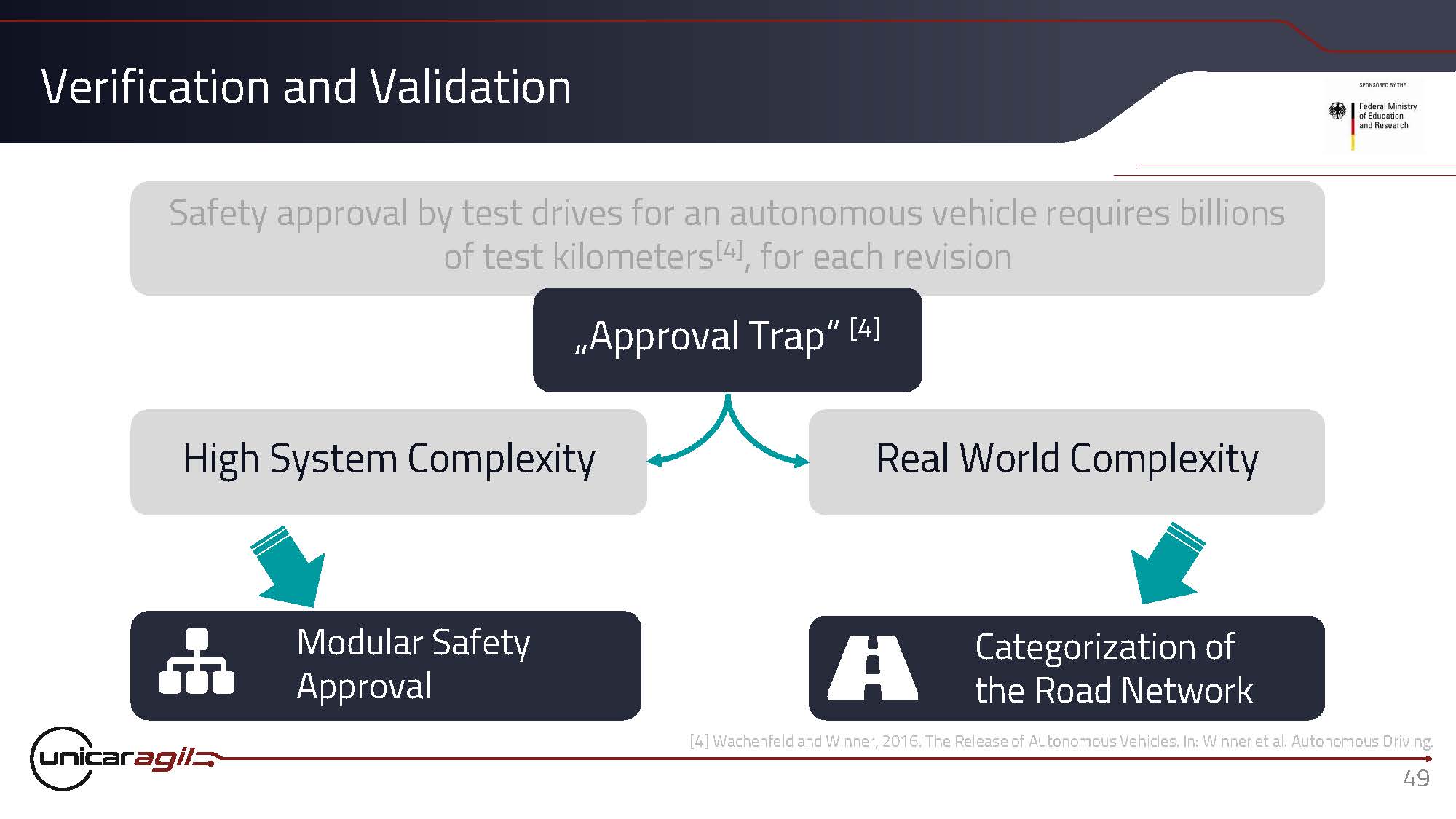
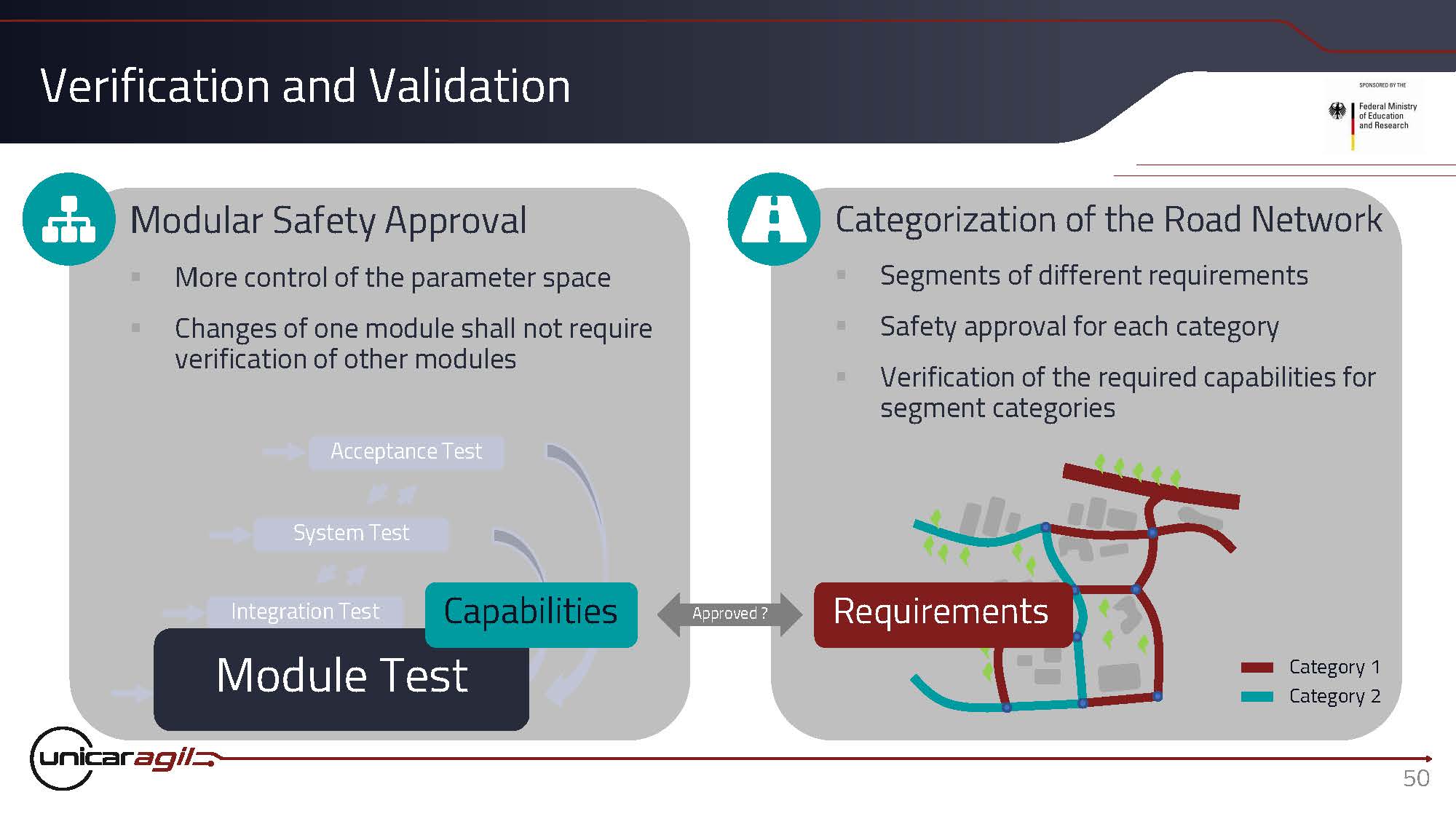
A system-wide safety and security concept for the vehicles is developed and implemented in hardware and software. Innovative and central components are self-awareness, which continuously determines the capabilities of the vehicles, and the fallback level "Safe Halt", which brings vehicles safely to a standstill even in the event of defects and thus replaces a human fallback instance. The modular safety assurance enables subsystems to be released independently of the overall system, thus facilitating the replacement and improvement of individual modules. This is supplemented by the qualification of suitable operating environments on the basis of a requirements-based categorization of route sections. Finally, state-of-the-art realization of the core components of the IT and onboard energy network as well as the diverse and redundant environment sensors are part of the safety and security concept.
The Concept
Please click on a module for more information.
THE DYNAMICS MODULES
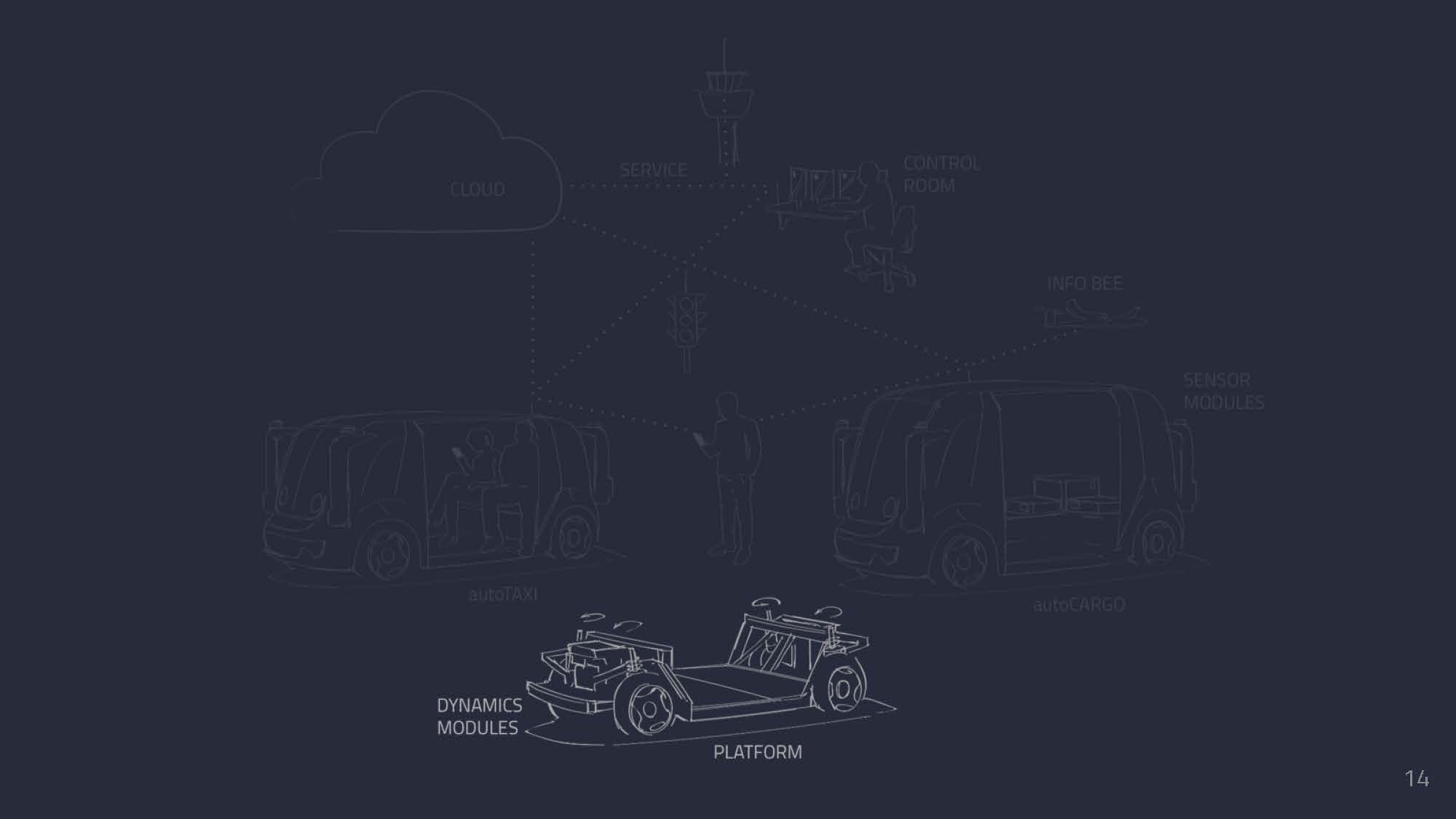
The dynamics modules form the most important components for the actual movement of the vehicles. Four almost identical dynamics modules are mounted on each platform of a UNICARagil vehicle. These have the task of realizing the trajectories specified by the various computing units. They form the direct contact to the road surface and are responsible for the tasks of steering, driving and braking. Each dynamics module is individually controllable and can realize steering angles of up to 90°. This enables completely new forms of movement in road traffic.
For this purpose, a dynamics module consists of the actuators for the movement of the vehicle and the corresponding control unit. The wheel, the suspension, an integrated wheel hub motor, the friction brake and a steering actuator form the mechanical part of the module. Both electric motors have their own power electronics, which are mounted in the vehicle platform. In addition, each dynamics module has its own control unit, which together with the control units of the other dynamics modules form the spinal cord. All associated control algorithms run on those control units.
![[Foto: Michael Struth]](/images/personen/struth-michael-200x200.jpg)
Michael Struth
RWTH Aachen University - ika
„The innovative dynamics modules integrate the steering, driving and braking functions in a single unit that can be used identically at any "corner" of the vehicle. The large number of degrees of freedom as well as steering angles of up to 90° allows for new forms of vehicle movement.“
All control algorithms run on an Aurix microcontroller with FreeRTOS. The toolchain allows software implementation either in Simulink or directly in C code. In addition, an interface board is developed, handling the connection to the rest of the vehicle, mainly through the use of BroadR-Reach Ethernet. The spinal cord can also communicate via FlexRay and CAN since not all prototype components in the vehicles are prepared for the use of Ethernet.
The spinal cord represents the bottom layer in the mechatronic architecture. During nominal operation, it receives its inputs from the brain stem, checks whether they are within the range of current capabilities, and controls the various actuators. In addition, the spinal cord constantly provides information about its own capabilities for other vehicle instances. In the event of a brain stem failure, the spinal cord is able to receive the signals directly from the cerebrum and control the vehicle through its own motion strategy to follow a trajectory request. During the commissioning process, a human driver who operates pedals and a sidestick controls the vehicle. The driver's input interfaces are directly connected to the spinal cord so that the vehicle can be operated even without the brain stem and cerebrum.
THE PLATFORM
A UNICARagil-vehicle is a combination of a platform and an add-on module. The add-on module is placed on the platform and fixed at defined points. Therefore, the platform itself is already driveable. This can only be achieved thanks to the dynamics modules and the energy supply in the floor structure. In UNICARagil, two platform sizes are being developed which can be used for all four vehicle versions. Key to this advantage is the high scalability and modularity of the structure. Since the UNICARagil-vehicles will be prototypically built, development of the vehicles takes place by highly focusing on the structural safety. The platform structure plays a major role in absorbing the loads that occur.
The priorities of the requirements significantly change in UNICARagil. Compared to a modern vehicle the dynamics modules need more room for operation. Only this allows the steering angles to be increased. On the other hand, there is the aim for maximizing the space in the passenger compartment. Additionally, entering the vehicle must be easy and a high payload has to be achieved. This requirements lead to a flat and slim structure design, which has a sufficient rigidity at the same time in order to realise safe operation. The developed platform structure of the UNICARagil-vehicles can be compared to a skeleton that plays a bearing role. Besides the safety during operation, safety in the event of accidents also plays a major role. The goal is to reduce possible intrusions to a minimum in the event of accidents. In case of a crash, implemented crash management systems absorb the kinetic energy by deformation. The mechanical behaviour for different operational loads, misuse cases and accident scenarios was intensively analysed and optimised with the simulation program LS-DYNA.
![[Foto: David Merdivan]](/images/personen/merdivan-david-200x200.jpg)
David Merdivan
RWTH Aachen University - ika
„Thanks to automated driving, innovative powertrain solutions and the goal of high modularity and scalability, requirements for vehicle structures will have to be re-prioritized in the future. This means that the development of body structures will face entirely new challenges that can only be solved by developing innovative structural concepts. UNICARagil shows that the vehicle of the future has to be rethought entirely.“
In order to implement the scalability, extruded aluminium profiles are mainly used. Thus, simple scaling is possible by extending the platform centre section. Together with the significant use of carry over parts, scalability and modularity can be achieved in the best possible way. The manufacturing of the prototypes is therefore much more efficient. Since a lightweight design should be realised, several aluminium alloys and carbon fibre-reinforced plastics are used.
DIE ADD-ON MODULES
The previously designed platform will be equipped with a modular Energy supply system, IT-infrastructure, thermomanagement and subsidiary package components and assembles the driving chassis. The four vehicles are completed with a scalable hut structure, modular exterior panels, door system and sensor modules. A scaling in length and height allows for an adaption of the vehicles dimensions according to the choosen modes of operation. Within the UNICARagil project two different sized vehicles are build. Based on a spacious structure, the autoShuttle and the autoCARGO are build as an substitute or extension of public transport and a new way of urban delivery. The structure is scaled in length and height to be able to provide a suiting smaller vehicle for on demand mobility and private owner ship. As part of the UNICAR-family the autoTAXI and autoEFL are derived.
![[Foto: Torben Böddeker]](/images/personen/boeddeker-torben-200x200.jpg)
Torben Böddeker
RWTH Aachen University - ika
„A modular toolbox for automated urban mobility build from scratch – Within the UNICAR agil project we have the unique opportunity to rethink the car as it is today and design user centered mobility solutions for the urban environment of tomorrow. From the private chauffeur to the fully automated delivery service.“
In contrast to conventional private owned or chaired vehicles, the interior is no longer designed around the driving task but instead, based on specific scenarios, tailored to the defined use case. The customers’ requirements are derived from surveys, creative workshops and observations and directly feed into the early stages of the concept development. The progress is constantly checked by user audits. The elimination of the driving task offers the potential for disruptive interior designs which are exploit best in this user centered approach.
THE SENSOR MODULES
All four vehicles are equipped with identical sensor modules that are mounted at their corners. The sensor modules are self-contained modules in terms of their mechanical design as well as their mechatronic function such that they contribute to the service oriented, strictly modular hardware and software design for fully automated and driverless vehicles for urban environments.
Each sensor module contains several radar sensors, a lidar sensor, monocular and binocular cameras as well as a processing unit that is used to evaluate the sensor data. The sensors are mounted in such a way that a horizontal measurement area of 270° can be perceived. The processing unit evaluates all sensor data and calculates an individual environment model. It is composed of a list of dynamic objects in the vicinity of the vehicle. Each object is described by its object type, its position, size, and velocity. Furthermore, the environment model describes free space and obstacles in the environment using an occupancy grid map. A grid map partitions the environment into small cells and describes how likely each cell is occupied by an obstacle. The ego position of the vehicle is calculated using the cameras of each sensor module.
![[Foto: Michael Buchholz]](/images/personen/buchholz-michael-200x200.jpg)
Michael Buchholz
Ulm University - MRM
„The sensor modules for the automated UNICARagil vehicles replace the driver's perception in conventional vehicles. They are equipped with video cameras as well as RADAR and LiDAR sensors to combine the benefits of different sensor principles. The redundancy also ensures increased safety in perception. Using artificial intelligence and machine learning methods, the sensor data are used to calculate environment models further steps of automation.“
The individual environment models of all sensor modules are communicated to the cerebrum computer which fuses them into a consistent, overall environment representation. The objects are localized with respect to the high definition digital map of the road network. Further processing steps to calculate behavior and movement of the ego vehicle are based on the fused environment model. Since the measuring areas of neighboring sensor modules overlap it is possible to substitute missing information of one sensor module by information of neighboring ones so that the vehicle can move safely even if one sensor modules fails.
THE CONTROL ROOM
The control center is an essential part of the overall concept of an automated mobility offer. Regardless of the application, control centers have three essential tasks. First, they control systems during unforeseen events. Second, control centers operate automated systems and are therefore responsible for the automated systems. Third, control centers have the premise to increase the benefit of the automated system by keeping delays low and by avoiding system failures.
In the UNICARagil project, these tasks will be adapted to the mobility and transport offer of an automated vehicle fleet. The control center acts as a central point of contact and consists of an emergency center, a service workplace and a teleoperation workplace.
Teleoperation is a research focus at the Chair of Automotive Engineering at the Technical University of Munich. From the teleoperation workstation, the control center solves on-board problems without service personnel on site. Expected problems on the vehicle side are, for example, technical defects in hardware and software. In the event of technical defects, the tele-operator uses the remaining sensors and actuators to manoeuver the vehicle to a suitable location. Depending on the type of technical defect, on-board automation services are deployed in order to support the tele-operator. A further problem is the situational crossing of system boundaries in vehicle automation. The vehicle recognizes the transgression, terminates the automated journey and reports to the control center. The tele-operator decides on the procedure for overcoming the system boundary and puts the vehicle in a state from which it can continue driving independently.
![[Foto: Frank Diermeyer]](/images/personen/diermeyer-frank-200x200.jpg)
Frank Diermeyer
Technical University of Munich - FTM
„With UNICARagil, tele-operated driving becomes a fixed component of the concept in the use of automated vehicles for the first time. This increases the field of action of the control room and thus increases enormously the availability and performance of the whole mobility system.“
The service workstation manages the operation of the vehicle fleet. First, it has an overview of the condition of the vehicles. If necessary, it can also assign routes to the vehicles or modify current routes. In addition, it has access to the vehicle schedules and can modify the segments used for routing in order to prevent navigation through temporarily blocked roads.
The emergency center receives emergency calls from passengers and urgent messages from other control centers.
THE CLOUD
Future vehicles will not only be automated but also connected to other traffic participants and supporting infrastructure. Together, they form a Cooperative Intelligent Transport System (C-ITS). There are multiple objectives when designing a C-ITS. Most importantly, the safety of all traffic participants should increase by introducing such a system. Another goal is an increase in the efficiency of mobility. By allowing more forms of cooperation, traffic efficiency may rise. People and goods get to their destination more reliably and in less time. This can also increase the efficiency of our use of natural resources, especially those that provide the energy needed to build, maintain and run the transport system.
Until recently, the amount of data shared by vehicles through wireless networks needed to be relatively small because communication technology such as LTE (4G) is not suited for certain functionalities. Automated driving requires very small latency and high reliability. A vehicle needs to base its behavior decisions on current information, otherwise important elements in the environment might be missed.
![[Foto: Bastian Lampe]](/images/personen/lampe-bastian-200x200.jpg)
Bastian Lampe
RWTH Aachen University - ika
„Future vehicles are not only automated but also connected. This enables an effective cooperation, which may lead to transportation systems that are increasingly efficient and safe. We develop the UNICARagil Cloud to act as a framework within which vehicles may collectively perceive and understand their environment. Due to an ever changing world, we apply machine learning approaches that allow the used algorithms to be automatically adjusted and evaluated.“
With the advent of new communication technologies such as 5G, new possibilities arise because more of the requirements can be met. If combined with other advancing technologies such as Machine Learning and Cloud Computing, a big leap in the abilities of automated vehicles as part of a C-ITS becomes conceivable. UNICARagil strives to develop concepts for these new possibilities.
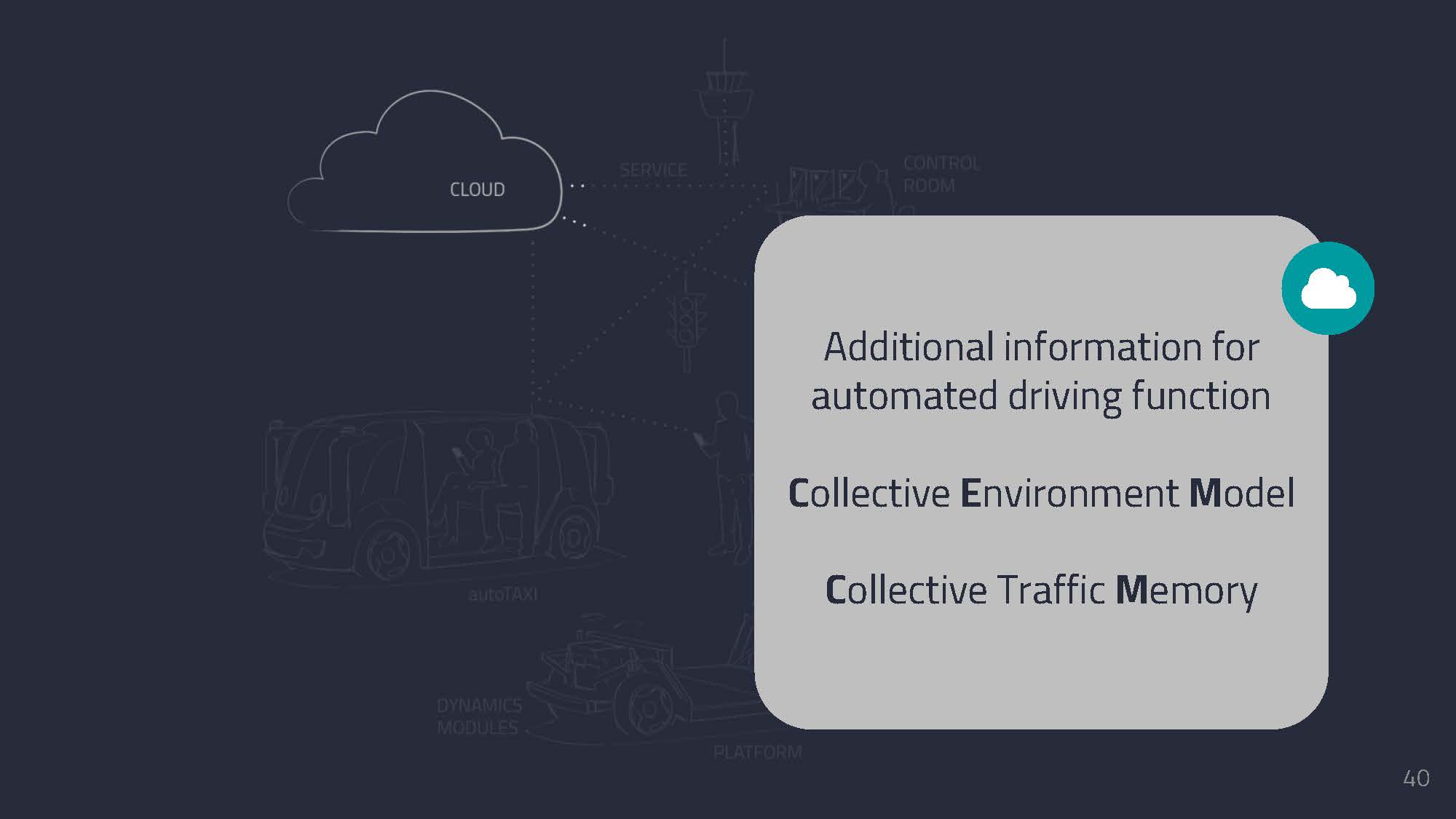
The elements in the UNICARagil cloud concept allow:
- Collective environment perception with a large number of traffic participants,
- Mutual verification of environment perception of traffic participants,
- Learning from large amounts of data continually gathered by the cloud-based system,
- Collective route planning and trajectory optimization.
These functionalities are implemented in the software components Collective Environment Model, the Collective Memory and the Collective Behavior. They run on cloud servers and support the automated vehicles developed in UNICARagil.
THE SERVICE ORIENTATION
Service-oriented architectures consist of loosely coupled services that are dynamically assembled at runtime. In contrast to conventional architectures in today's vehicles, in which dependencies between components are fixed in the course of the vehicle engineering process, our architecture allows components to be exchanged, updated or repurposed. The interaction between services is controlled by an orchestrator, which determines and establishes the best system configuration at runtime, depending on the needs of the current driving situation. Since system integration decisions are not part of the individual software components, the exchangeability and reusability of the components is guaranteed. We provide a software framework that allows to implement such services for all compute platforms in the UNICARagil vehicles. Additionally, we support the architecture specification with a collaborative, web-based tool for architecture description.
![[Foto: Bassam Alrifaee]](/images/personen/Alrifaee_Bassam_200x200.jpg) Bassam Alrifaee
Bassam Alrifaee
RWTH Aachen University - i11
„Today's software development in the automotive industry follows paradigms that are not suitable for keeping up with the increasingly shorter life and development cycles of automated and connected vehicles. We research a modular and flexible service-oriented software architecture, which will facilitate the agile development process.“
THE SAFETY AND SECURITY
The automated operation of vehicles on public roads results in highest safety demands. In conventional vehicles, which can be equipped with assistance systems up to SAE Level 2, the human driver is the main instance to ensure safety. The driver is responsible for monitoring the vehicle permanently and, in case of any doubt, driving the vehicle. In vehicles with higher levels of automation, human monitoring is no longer necessary, and all safety tasks previously performed by humans are now performed by the technical system.
Thus, safety is one of the key prerequisites for the planned introduction of SAE Level 3+ vehicles on public roads. This disruption makes a public discussion about the safety level to be achieved necessary, as no human driver or supervisor can take over control in case something goes wrong. At the same time, the topic of safety is still underrepresented in the automated driving community. In addition, companies regard their approaches in this area as trade secrets and publish only part of them.
![[Foto: Torben Stolte]](/images/personen/stolte-torben-200x200.jpg)
Torben Stolte
Technical University Braunschweig, LfR
„Safety is probably the key challenge for the intended introduction of driverless vehicles on public roads. At the same time, it is not clear which level of safety driverless vehicles must achieve. UNICAR agil offers the possibility to systematically consider safety at all levels of vehicle automation. We can ask questions, look at them from different perspectives, and present possible solutions. Thus, UNICAR agil will make an important contribution to the discussion of the safety of automated vehicles in both, research and public.“
In UNICARagil, we consider safety as an integral part of research and development. In the projects, we aim at creating a publicly available reference for the development of safe automated vehicles. Furthermore, our intention is to ensure a safe driverless demonstration of the vehicles at the end of the project. At the same time, the work will advance the scientific exchange with respect to automated vehicles' safety.
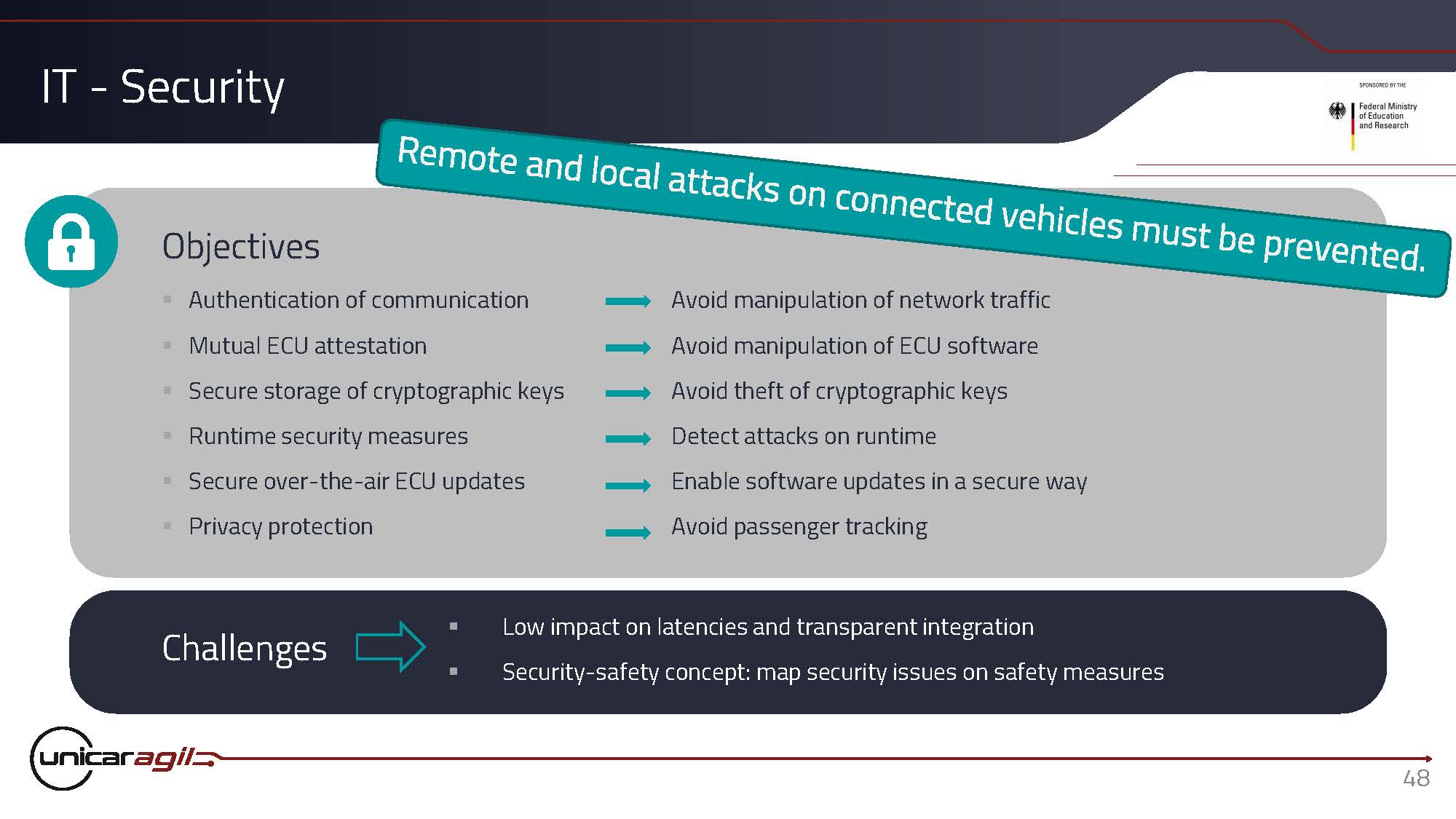
The research in the safety domain of UNICARagil focuses on numerous aspects. A first focus is the systematic safety conception of the functions, which are developed in the environment of a strongly parallel development as in the UNICARagil project. Innovative aspects of the safety concept are investigations for the introduction of a fallback level, which transfers the vehicle to a risk-minimal state in the event of degradation, as well as the comprehensive health monitoring of the overall system at runtime, which serves as an important input for the vehicle's decision making. In addition, technical safety concepts for the modular actuator modules and the E/E architecture will be developed. The system integration is supported by a systematic timing analysis of the entire processing chain from environmental sensors to actuators. Moreover, the safe interaction of human and vehicle is considered, too. Finally, we also investigate IT security aspects and its interconnection with the previously mentioned safety aspects.
THE INFO-BEE
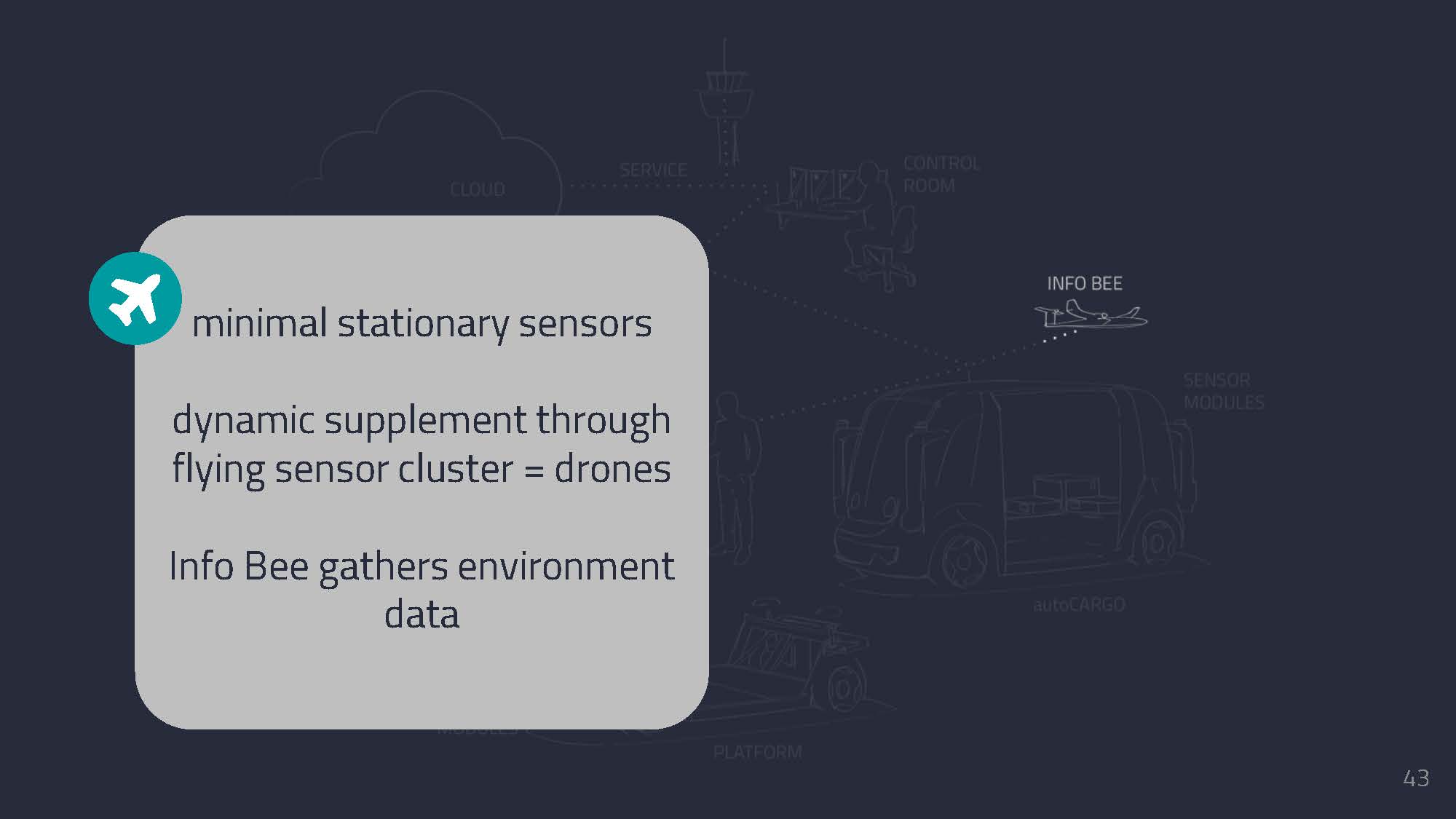
Drones are used in the UNICARagil project as flying sensor platforms to supplement the external vehicle environment model. An essential prerequisite for behavior planning of autonomous vehicles is the knowledge of the vehicle environment and a prediction of the expected behavior of other road users in the vicinity. The dynamic model of the vehicle environment is composed from information acquired by vehicle sensors, digital maps and other data sources. The vehicle can then base its behavioral decisions on this overall picture.
In addition to the vehicles own sensors, UNICARagil will use external sensors to compose the environment model. These sensors can be mounted on buildings, infrastructure and also on flying drones. One advantage of the birds eye view of the flying sensor platform lies in its ability to capture situations which might be hidden from a ground based sensor. Also, a drone can act completely independent from the ground vehicles and thus can collect information e.g. about obstacles early in advance before a ground vehicle reaches the obstacle.
![[Foto: Norbert Siepenkötter]](/images/personen/siepenkoetter-norbert-200x200.jpg)
Norbert Siepenkötter
RWTH Aachen University - FSD
„The view of the vehicle's own sensors is limited to the ground perspective. External sensors, e.g. installed on buildings, can provide valuable additional information. Furthermore, the highly automatic aircraft, which are developed in UNICAR agil, allow a targeted and demand-driven "view from above" at practically any location.“
In order to meet the demand for vertical take-off and landing capability combined with a long range, the drone is based on a tilt-wing system. This flight system, which in normal flight acts like a classic aircraft can vertically start and land by tilting the wing and the attached motors. The entire flight including data acquisition of the drone is automated and monitored from a ground station. All collected data is automatically processed and stored in a cloud that is also part of the UNICARagil project.
The Vehicles
- autoTAXI
- autoELF
- autoSHUTTLE
- autoCARGO
![[Sketch: autoTAXI]](/images/prototypes/2020-05_auto-taxi.jpg)


The autoTAXI is agile and can adapt exactly to the needs of its customer. The various motto taxis offer the right interior concept for every reason to travel.
Studies on autonomous vehicles show that the users of these vehicles wish to be able to engage in various tasks while driving. This statement can be fully applied to autonomous taxis. In addition, taxis will represent a much greater proportion of people‘s mobility, for example, as they can be called anywhere very easily using apps.
Simple agile ordering of the required taxi enables a fleet of “motto taxis“, which are perfectly equipped for the needs during the upcoming trip. Numerous interior concepts from “sleep taxis” to “party taxis” to “tourist taxis” are conceivable. The autoTAXI, which will be realized within the project, can be considered as „working taxi“. It will be adapted to the needs of business people. Deskwork of a single person as well as meetings should be possible through the corresponding interior topology and supporting interior Human Machine Interfaces (iHMI). Thus, autoTAXI shows only one of many variants and stimulates the fantasy to imagine further possible motto taxis of an entire fleet. These will be adapted in their entirety to our needs of tomorrow‘s mobility.
![[Sketch: autoELF]](/images/prototypes/2020-05_auto-elf.jpg)

The autoELF represents a completely individual and private family vehicle. With its accessible and inclusive design, all family members can fully enjoy their journeys.
Like the autoTAXI, the autoELF is a smaller vehicle version and is developed to provide as many members of a family as possible with individual mobility and to meet their individual needs while driving. Those needs of individual family members can be very different. Those who are dependent on the support of a companion who is able to drive a conventional vehicle have particularly high demands. Possible applications are, for example, driving grandparents to a doctor‘s appointment or driving children to a sports club. In the future, physically handicapped people will also be able to be mobile without barriers and there will be no need for an accompanying person. In this way, autoELF helps its users to achieve new autonomy in everyday life. The concept of the autonomous family vehicle is completed by an elegant exterior design and a homely interior that is adapted to the diverse needs of its users. Here, individuality is at the forefront.
![[Sketch: autoSHUTTLE]](/images/prototypes/2020-05_auto-shuttle.jpg)


The autoSHUTTLE offers space for up to eight people and is part of a new and improved public transport system. Optimally adapted to the needs of users at all times, it represents the public transport of the future.
An intelligent routing system is intended to shorten travel times in public transport. The routes of the individual vehicles are planned in a fixed stop network so that passengers’ desired starting-points and destinations are approached sensibly and efficiently at the same time. By moving away from fixed timetables and route networks, the shortest and fastest route for the current passengers is selected. The interior of the vehicles will also adapt to futureconditions. Although six passengers can be comfortably seated, the interior can be transformed to enable other scenarios of use when the number of passengers is higher. Up to three seats maybe stowed in order to be able to use the freed-up space in rush hour as standing room and to increase the capacity of the vehicle to eight people. This space can be used to carry bulky luggage, bicycles or wheelchairs, as well. The Human Machine Interface (HMI) is being developed with the aim of optimising trust in and handling of automated vehicles. The absence of a human driver is compensated by intuitive interaction and predictable behaviour.
![[Sketch: autoCARGO]](/images/prototypes/2020-05_auto-cargo.jpg)


The autoCARGO illustrates our automated pickup and delivery vehicle. With its efficient storage system, it takes your shipment to the next level.
Receiving and sending parcels is handled by the autoCARGO regardless of the presence of its customers. AutoCARGO drives and delivers autonomously and electrically, is locally emission-free and designed for urban environments. Private and public parcel boxes can be approached and operated fully automatically. The desired parcel box can be defined individually for each consignment in the associated app in an easy way. Connected with other vehicles and information systems, it can flexibly react to traffic disruptions. The batteries are automatically inductively charged in the parcel centre. Like the other vehicles autoSHUTTLE, autoTAXI and autoELF, the autoCARGO has a modular design. autoCARGO differs from autoSHUTTLE in its interior. Instead of the variable interior for up to eight people, it is equipped with handling technology for parcels and a storage room. A special articulated robotic arm is used to safely load and unload the parcels. Parcels are stacked in the exchangeable loading container and can be loaded and unloaded at the parcel centre in a short time.