Die Idee
Worum geht es konkret?
Bei der Bewältigung der Herausforderungen, die sich aus einem steigenden Mobilitätsbedarf und der fortschreitenden Urbanisierung ergeben, werden automatisierte elektrische Fahrzeuge eine Schlüsselrolle einnehmen. Sie schaffen die Grundlage für einen nachhaltigen und intelligenten Straßenverkehr, neuartige Mobilitäts- und Transportkonzepte sowie Verbesserungen der Verkehrssicherheit und Lebensqualität in urbanen Räumen.
![[Foto: Prof. Dr. Lutz Eckstein]](/images/personen/eckstein-lutz-200x200.jpg)
Prof. Dr. Lutz Eckstein
RWTH Aachen - ika
„In UNICARagil ist es uns erstmalig gelungen, die forschungsstärksten deutschen Universitäten im automatisierten und elektrischen Fahren sowie ausgewählte, hochinnovative Unternehmen in einem Projektkonsortium zu vereinen. Mit Unterstützung des BMBF wollen wir einen substanziellen und nachhaltigen Beitrag dazu leisten, dass auch die Wiege zukünftiger Automobilgenerationen in Deutschland stehen wird.“
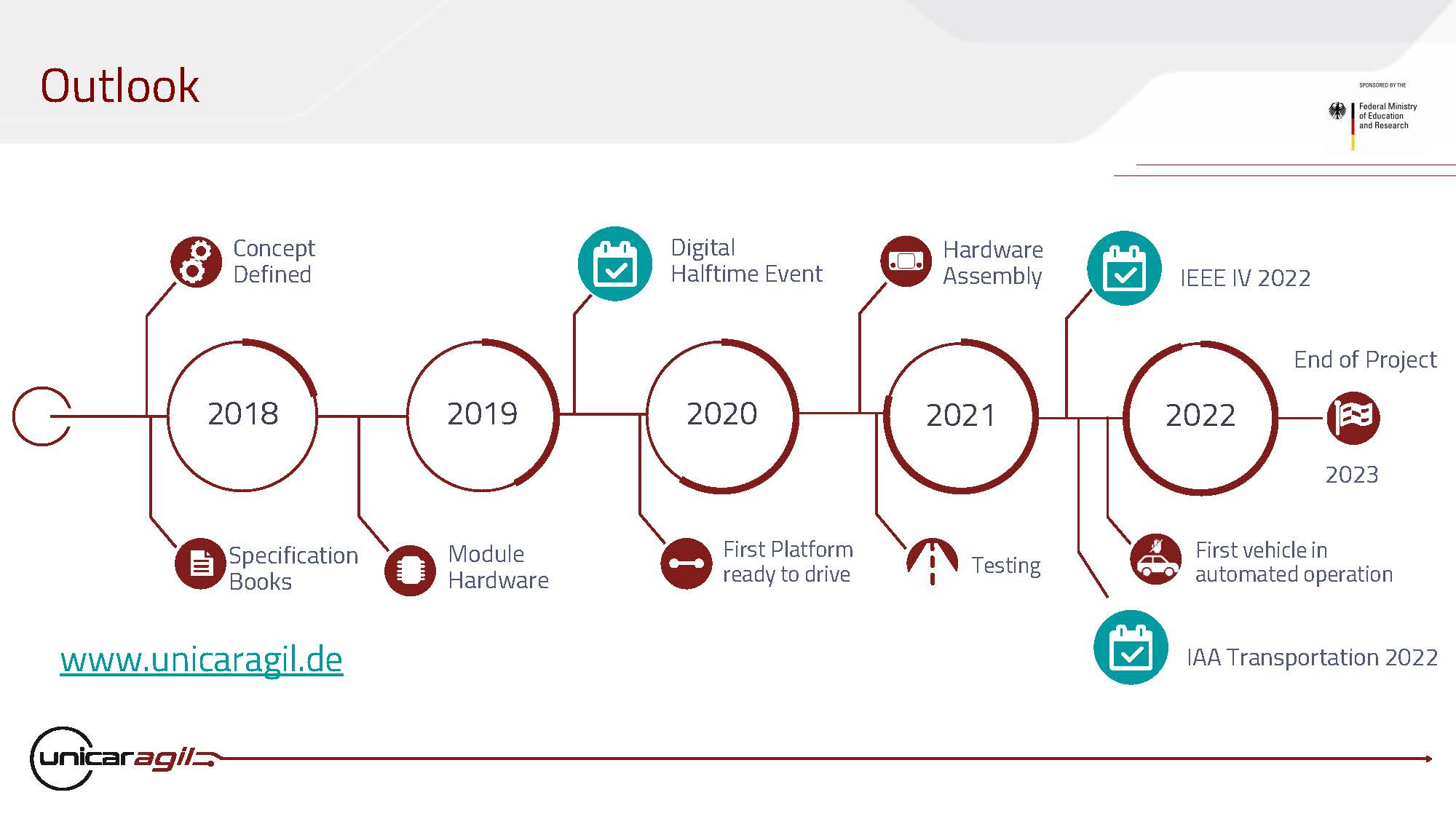
2018 – 2023
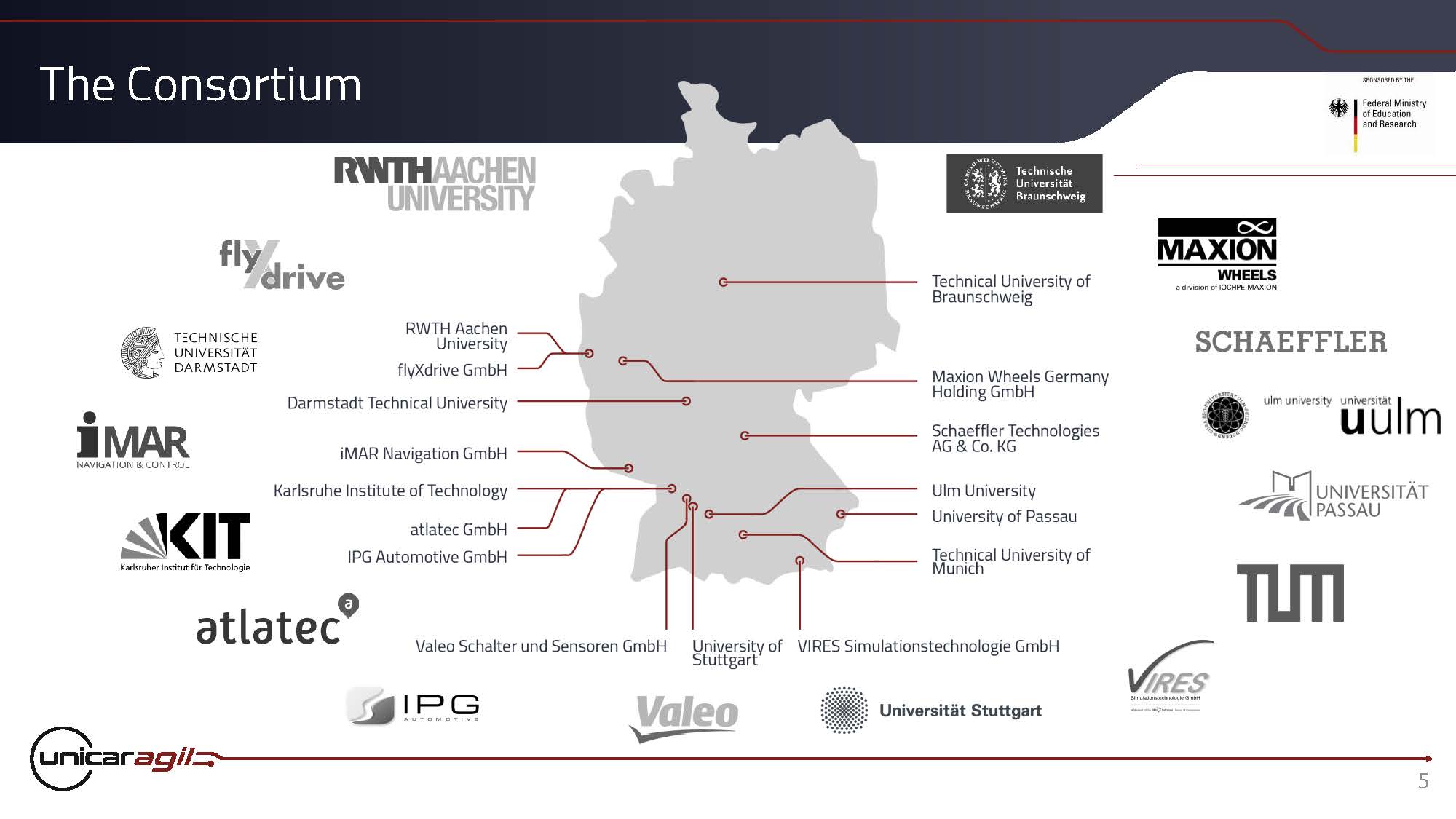
15 Lehrstühle an
8 Universitäten
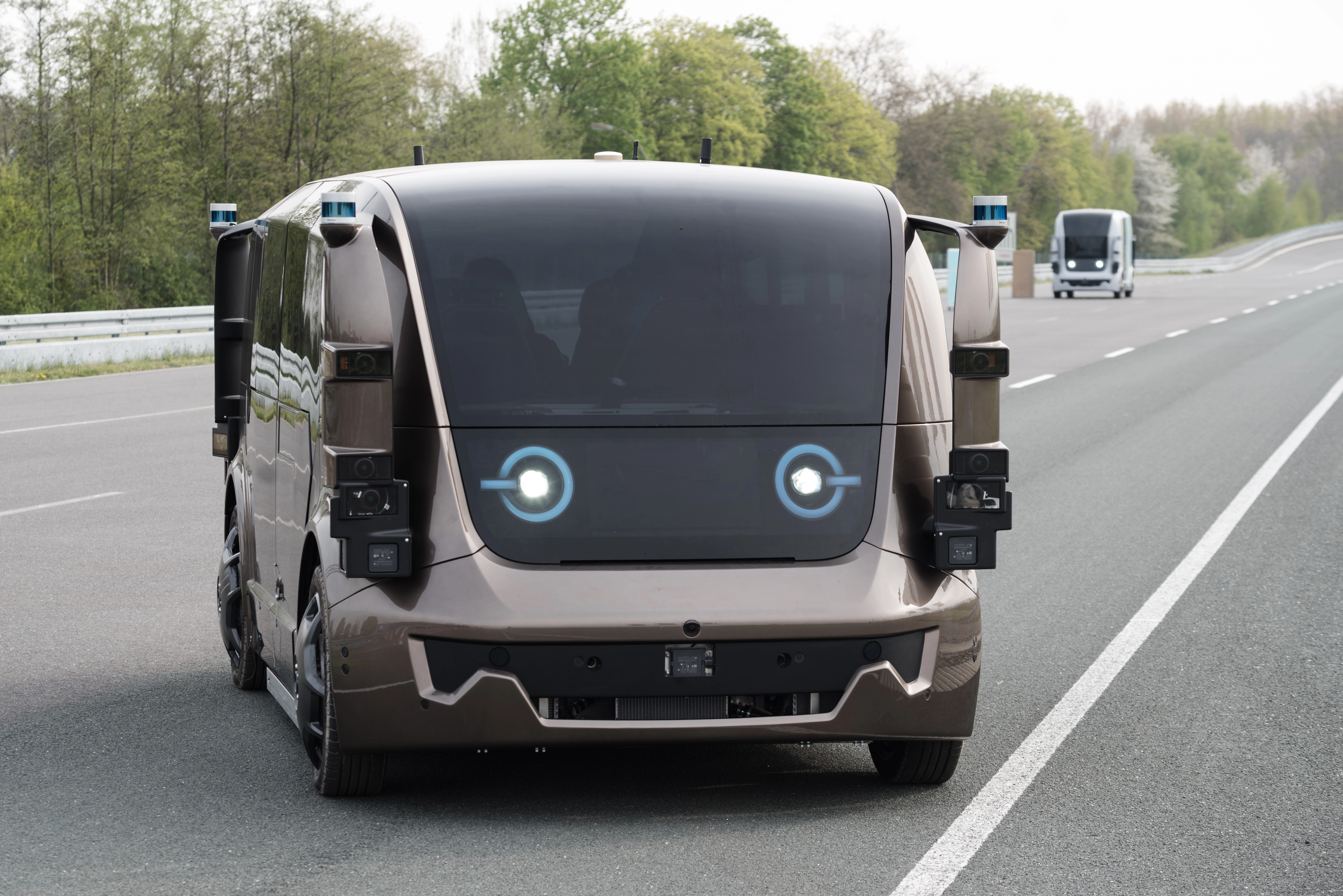
Im Vorhaben UNICARagil werden, ausgehend von neuesten Ergebnissen der Forschung zum automatisierten und vernetzten Fahren sowie zur Elektromobilität, vollständig fahrerlose elektrische Fahrzeuge entwickelt. Die Grundlage hierfür bildet ein Fahrzeugkonzept, das aus Nutz- und Antriebseinheit besteht. Es soll sich flexibel an vielfältige Anwendungsfälle in Logistik und Personentransport anpassen – insbesondere in Szenarien, in denen der Einsatz fahrerloser, emissionsfreier Fahrzeuge sinnvoll ist.
![[Bild: UNICAR<em>agil</em> Autos]](/images/medien/bilder/Familie/UNICAR_Familie.webp)
8 Industriepartner,
davon 4 KMU
Rd. 32 Mio. €
BMBF-Förderung
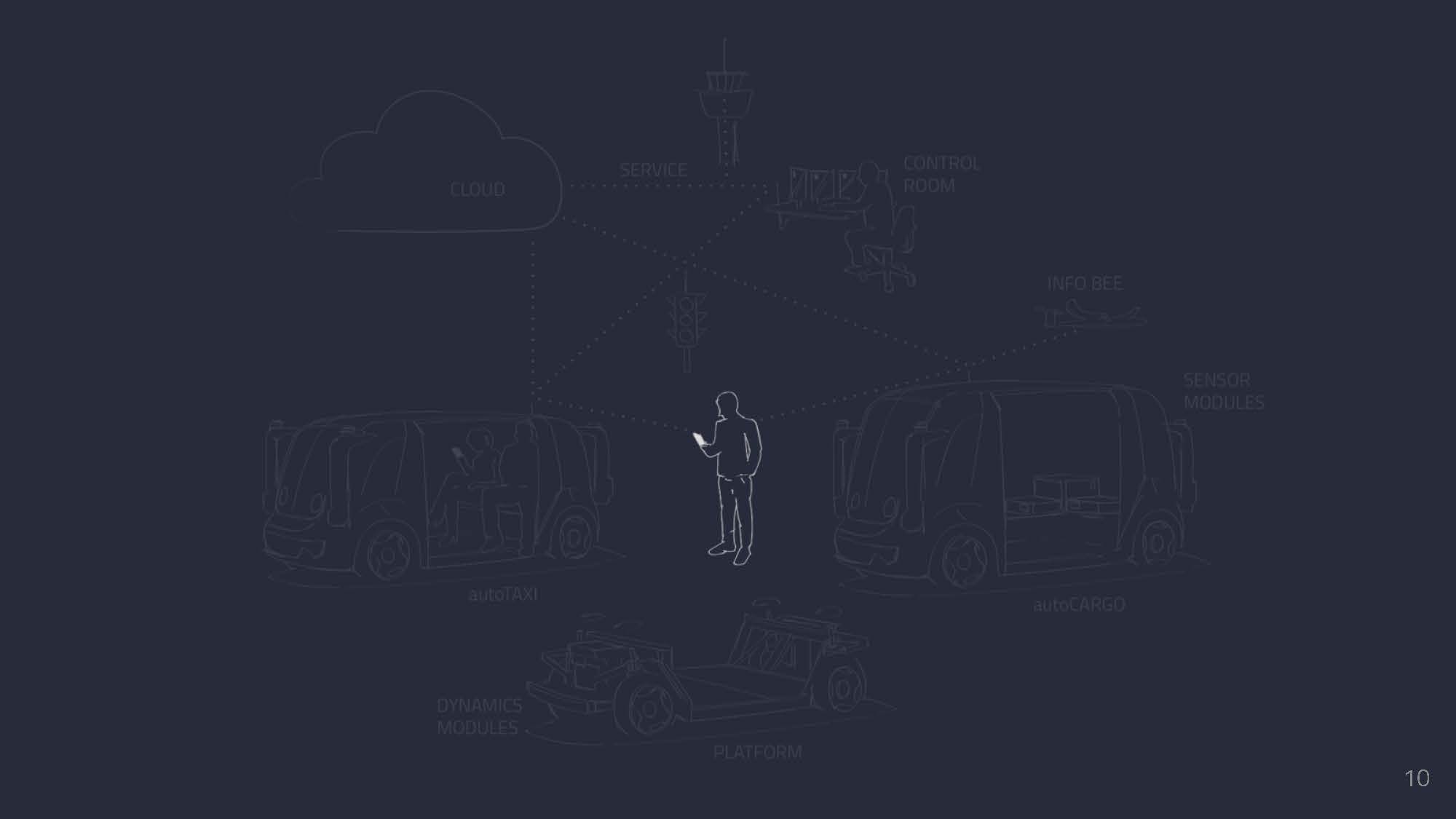
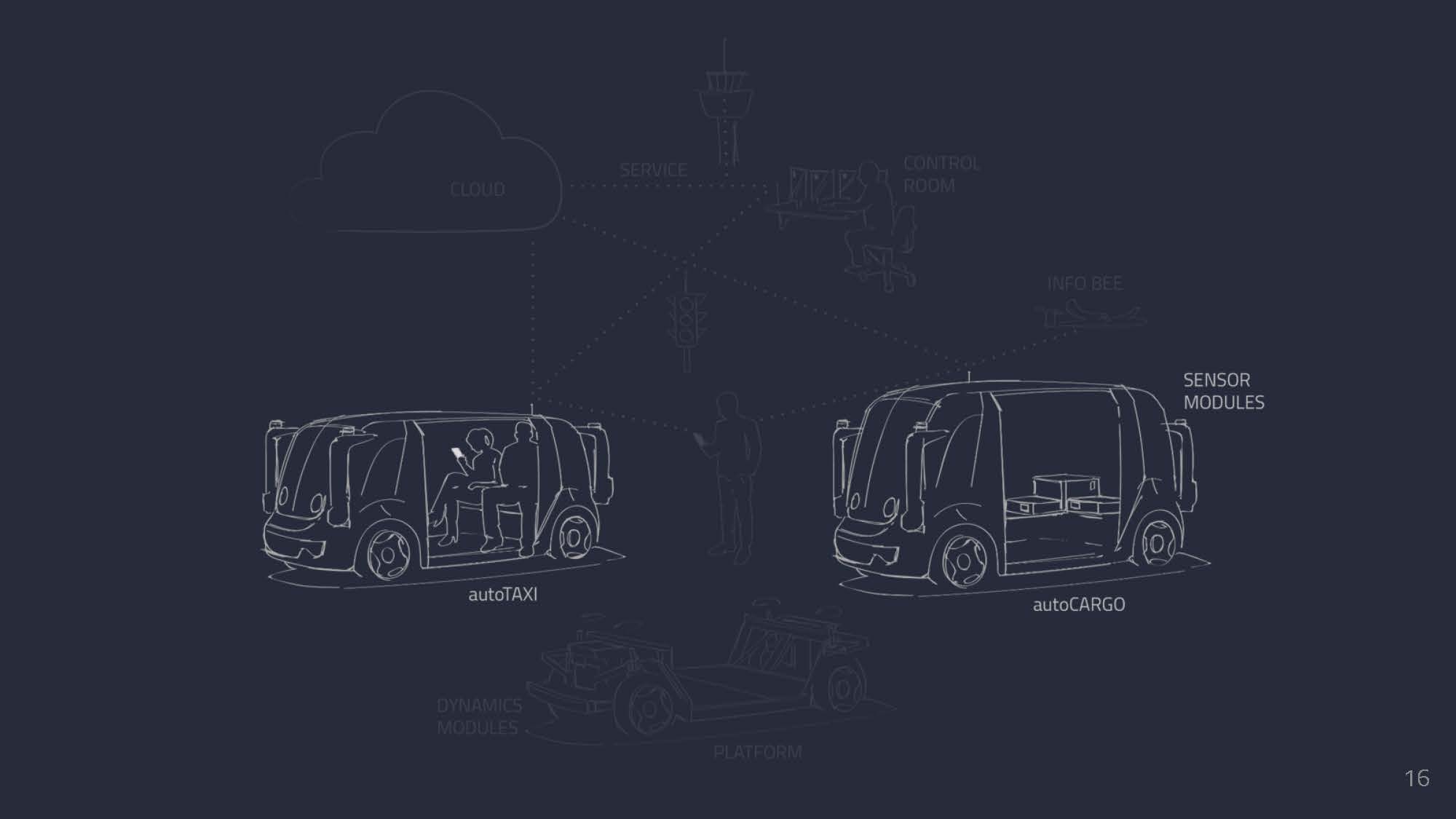
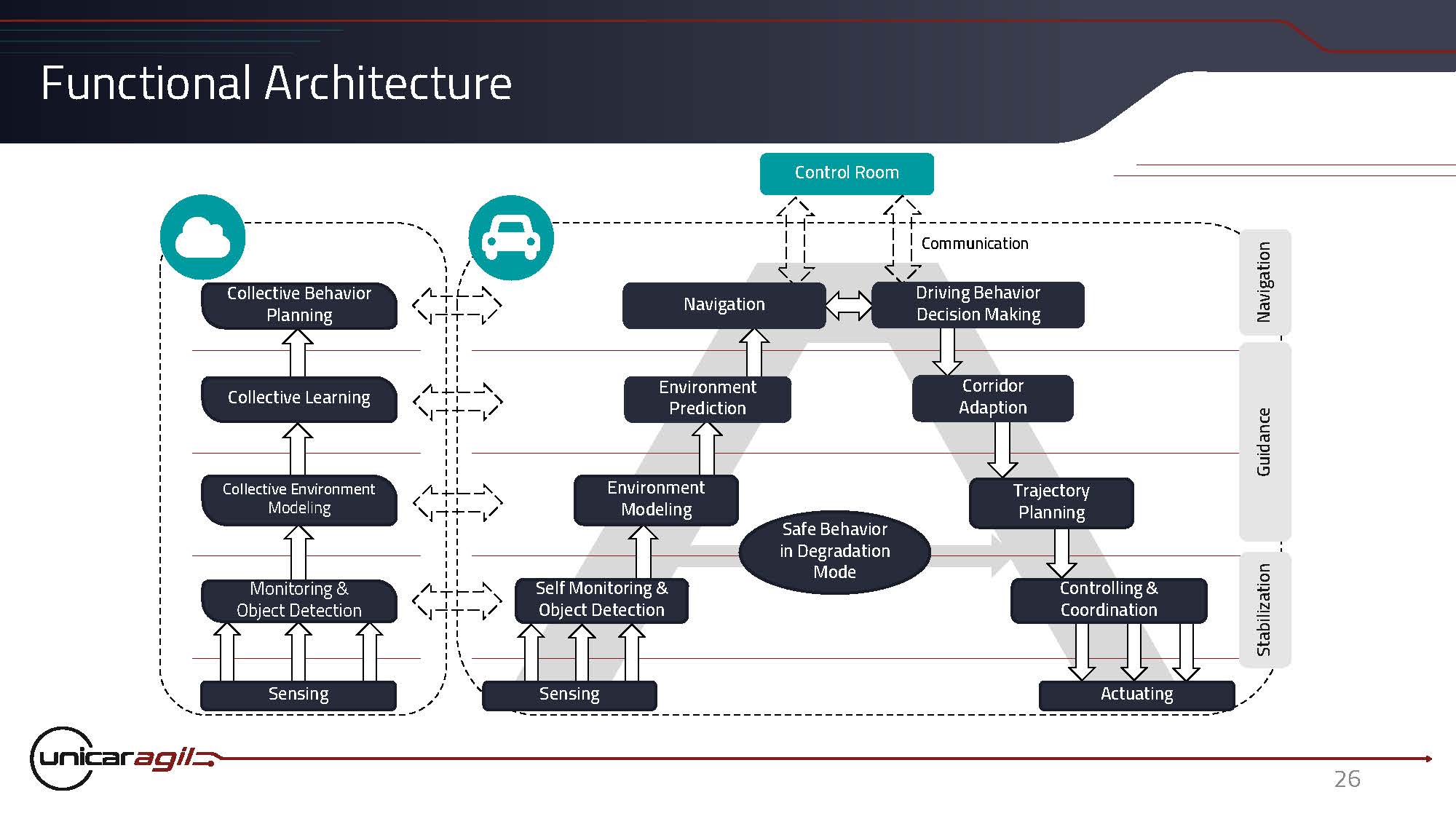
Kernelement der Forschungs- und Entwicklungsarbeiten ist die funktionale Fahrzeugarchitektur, die mit der Cloud, der Straßeninfrastruktur und einer Sensordrohne vernetzt ist. Weitere Schwerpunkte liegen in der Entwicklung generischer Sensormodule für die Umfelderfassung, einer flexibel erweiterbaren und updatefähigen Software- und Hardware-Architektur sowie hochdynamischen Radnabenantrieben, die völlig neue Bewegungsformen im Straßenverkehr erlauben und die UNICARagil Fahrzeuge besonders wendig machen. Den Abschluss des Projekts bildet eine Demonstration vier verschiedener Anwendungen auf Testfeldern in Deutschland.
![[Bild: UNICAR<em>agil</em> Timeline]](/images/timeline-de.svg)
4 Fahrzeuge
Vollautomatisiert
und fahrerlos
Dank der Förderung des Bundesministeriums für Bildung und Forschung von über 32 Mio. € konnten sich in UNICARagil acht der führenden deutschen Hochschulen im Bereich automatisiertes Fahren gemeinsam mit acht ausgewählten Unternehmen aus der Industrie zusammenschließen, um die ambitionierten Ziele des Projekts erfüllen zu können.
Das Projekt startete im März 2018 und erfuhr große Resonanz aus der interessierten Öffentlichkeit und Presse. In den folgenden fünf Jahren werden insgesamt 258 Teil-Arbeitspakete bearbeitet, um vier vollautomatisierte und fahrerlose Fahrzeuge und deren neuartige Architekturen zu entwickeln und aufzubauen.
![[Foto: Timo Woopen]](/images/personen/woopen-timo-2-200x200.jpg)
Timo Woopen
RWTH Aachen - ika
„UNICARagil ist einzigartig! Über 100 Wissenschaftler von 23 verschiedenen Partnern arbeiten gemeinsam an einem Ziel: Die Gestaltung der Mobilität von Morgen. Dank der Unterstützung des BMBF können erstmalig die verschiedensten Forschungsbereiche kooperativ und höchst agil an neuartigen Konzepten zum automatisierten und elektrischen Fahren arbeiten. Ich bin froh ein Teil dieses einzigartigen Teams zu sein!“
UNICARagil wird im Forschungsschwerpunkt „Disruptive Fahrzeugkonzepte für die autonome elektrische Mobilität (Auto-Dis)“ im Programm „Mikroelektronik aus Deutschland – Innovationstreiber der Digitalisierung“ unterstützt. Ziel ist es, Innovationen für das vollständig automatisierte Fahren der Zukunft (Stufe 5) voranzutreiben, die die evolutionäre Weiterentwicklung des Automobils übertreffen können:
Im Mittelpunkt stehen „disruptive“ Fahrzeugkonzepte, die neueste Technologien der Elektrifizierung und Automatisierung vereinen und die Grundlage für eine intelligente Mobilität, mehr Teilhabe, neuartige Geschäftsmodelle und Dienstleistungen schaffen können.
Das Vorhaben bietet die Chance auf vielfältige Innovationen bei Komponenten und Systemen für automatisierte elektrische Automobile sowie bei der Umsetzung automatisierter Fahrfunktionen. UNICARagil leistet damit einen substantiellen Beitrag zur Steigerung der Innovationskraft am Standort Deutschland im automatisierten elektrischen Fahren. Darüber hinaus werden die interdisziplinäre Forschung, Entwicklung und Lehre an mehreren Wissenschaftsstandorten in Deutschland im Vorhaben systematisch verzahnt und gestärkt.
Die Kerninnovationen
Nutzerzorientierung
Nutzerorientierung
![[Bild: UNICARagil Nutzerorientierung]](/images/kerninnovationen/uncr-nutzerorientierung.png)
Ein nutzerorientierter Einsatz neuartiger Technologien stellt den Menschen in den Mittelpunkt der Entwicklung zukünftiger Mobilitätssysteme.
Durch eine nutzerzentrierte Fahrzeugentwicklung, von der Nutzerbefragung (Bedarfs-/Bedürfnisanalyse) über Experten- und Probandenstudien (Co-Creation) bis hin zur virtuellen Absicherung, stehen die Bedürfnisse des Menschen bei den UNICARagil-Fahrzeugen im Vordergrund.
Von der mobilen Buchung über eine App bis zum Ausstieg nach der Fahrt – ein durchgängiges digitales Interaktionskonzept schafft ein komfortables Nutzererlebnis und erlaubt dem Kunden, sich während der Fahrt anderen Tätigkeiten zu widmen. Das inklusive Gesamtkonzept ermöglicht allen Menschen die Teilhabe an der automatisierten Mobilität der Zukunft.
Modularisierung
Modularisierung
![[Bild: UNICARagil Modularisierung]](/images/kerninnovationen/uncr-modularisierung.png)
Konsequente Modularisierung schafft Flexibilität in der Anwendung automatisierter Fahrzeuge.
Auf Basis eines modularen Strukturbaukastens lassen sich Fahrzeuge für verschiedenste Use-Cases realisieren – z. B. für den öffentlichen Nahverkehr, Mobility-on-Demand, Gütertransport oder persönliche Individualmobilität. Die zur Umfelderfassung entwickelten Sensormodule können flexibel nach Bedarf mit und ohne Redundanz ausgestattet werden. Softwaremodule können dank der Automotive Service-oriented Software Architecture flexibel ausgetauscht und aktualisiert werden.
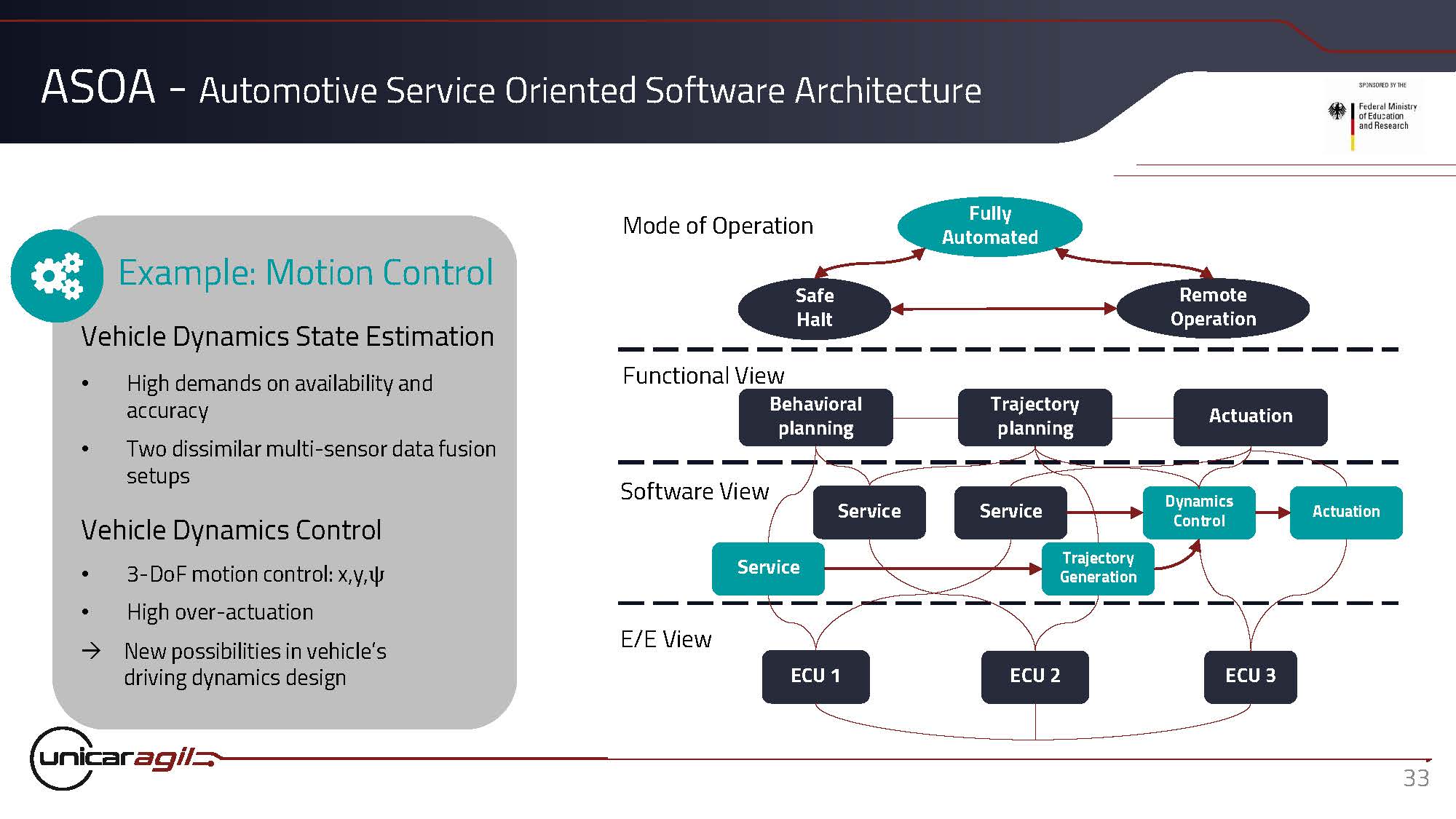
Eine konsequente Trennung der Automatisierungsfunktionen, z. B. von Bewegungsplanung und –regelung ermöglicht die Kontrolle des Fahrzeugs durch verschiedene Dienste – wie etwa durch einen Teleoperator in der Leitwarte oder die Rückfallebene Sicheres Anhalten.
Die Integration von Antrieb, Lenkung und Fahrwerk in ein Dynamikmodul auf 48-V-Basis ermöglichen disruptive Fahrzeugentwürfe sowie eine einfache Wartung und Updatefähigkeit.
Elektronik-Architekturen
Elektronik-Architekturen
![[Bild: UNICARagil Elektronik-Architekturen]](/images/kerninnovationen/uncr-elektronik-architekturen.png)
Neuartige Hardware-Architekturen im Elektroniksystem ermöglichen eine Implementierung effizienter und sicherer Steuergeräte.
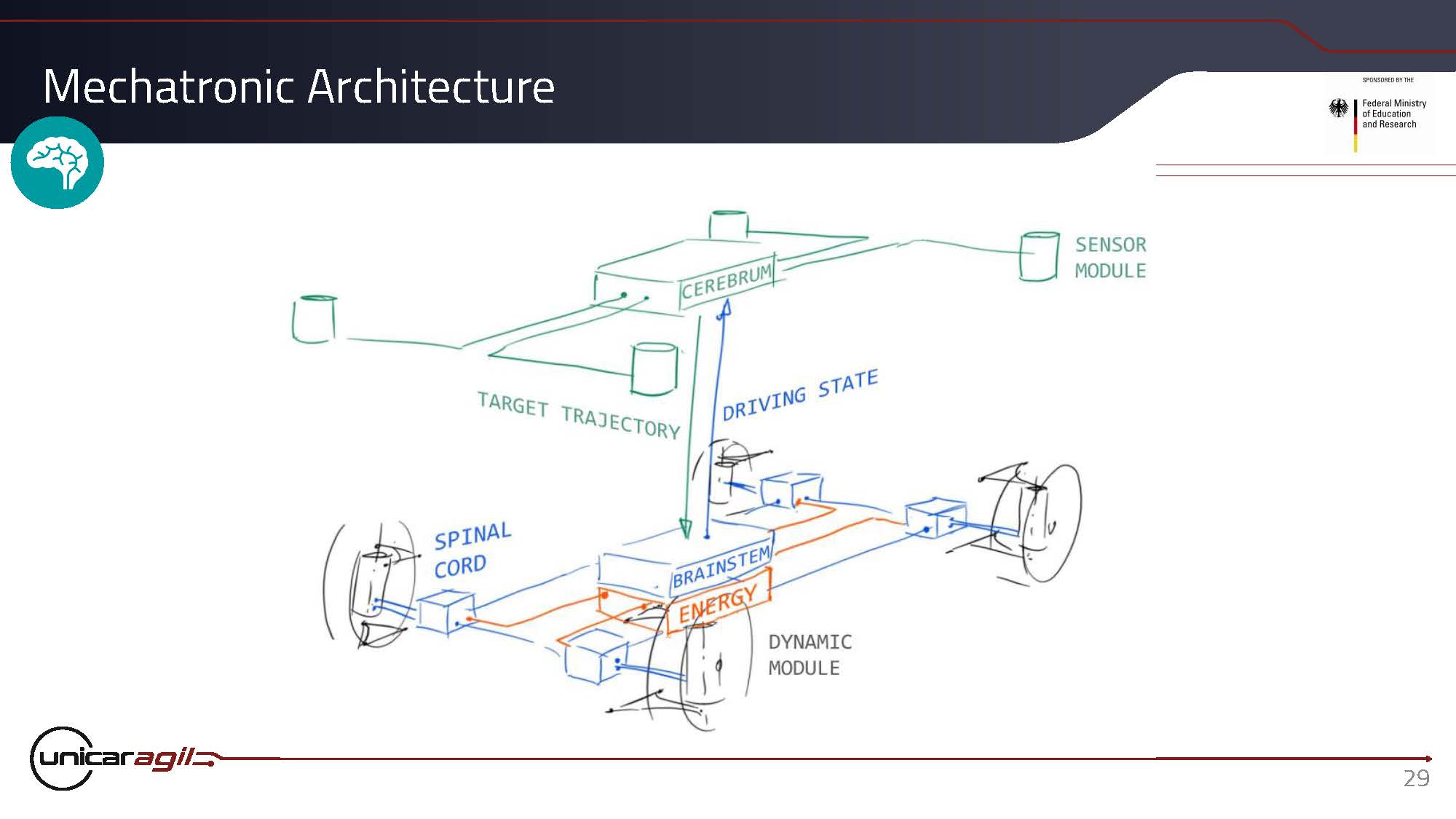
Nach dem Vorbild des menschlichen Nervensystems wird eine bionische E/E-Architektur entwickelt, in der Softwaremodule anforderungsgerecht auf die als Großhirn, Stammhirn und Rückenmark bezeichneten Steuereinheiten verteilt werden können – sowohl eigens entwickelte eingebettete Systeme als auch Hochleistungsrechner. Dadurch kann unterschiedlichen Bedürfnissen an Echtzeitfähigkeit, Rechenleistung und Sicherheit entsprochen werden, was UNICARagil von anderen Akteuren unterscheidet, die stattdessen auf eine zentrale Rechnereinheit setzen.
Die Steuergeräte kommunizieren über ein gemeinsames Ethernet-Netzwerk miteinander, was den Grundstein für den flächendeckenden Einsatz einer dienstorientierten Softwarearchitektur legt. Zudem gewährleistet die gewählte Vier-Zonen-Architektur eine hohe Verfügbarkeit der Energie- und Kommunikationsanbindung aller Hardware-Komponenten, so dass ein sicherer Betrieb der Fahrzeuge immer möglich ist.




Automotive SOA
Automotive SOA
![[Bild: UNICARagil Automotive SOA]](/images/kerninnovationen/uncr-automotive-soa.png)
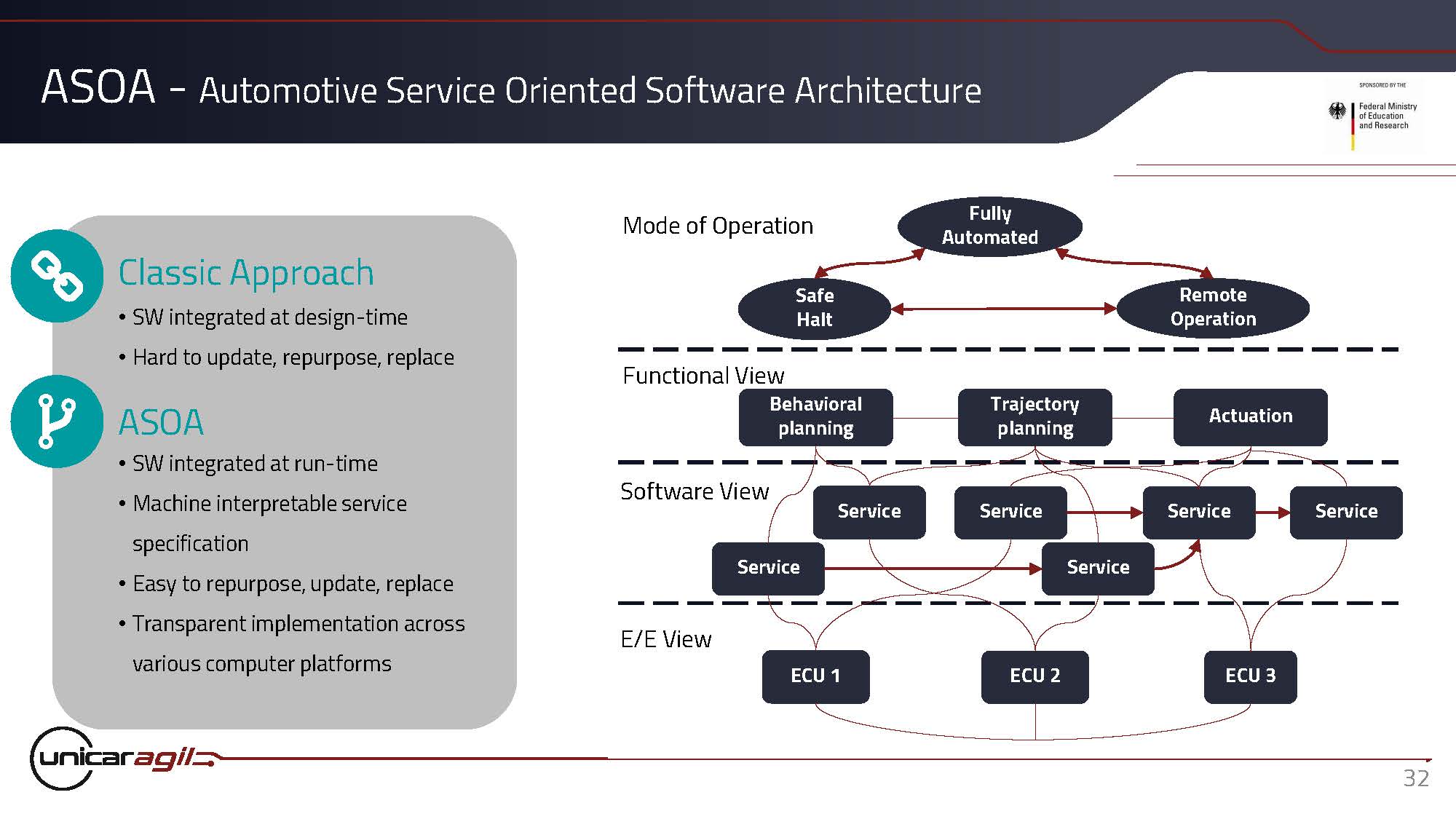
Die Automotive Service-oriented Software Architecture (ASOA) schafft die Grundlage für updatefähige Software im Elektroniksystem für das automatisierte Fahren.
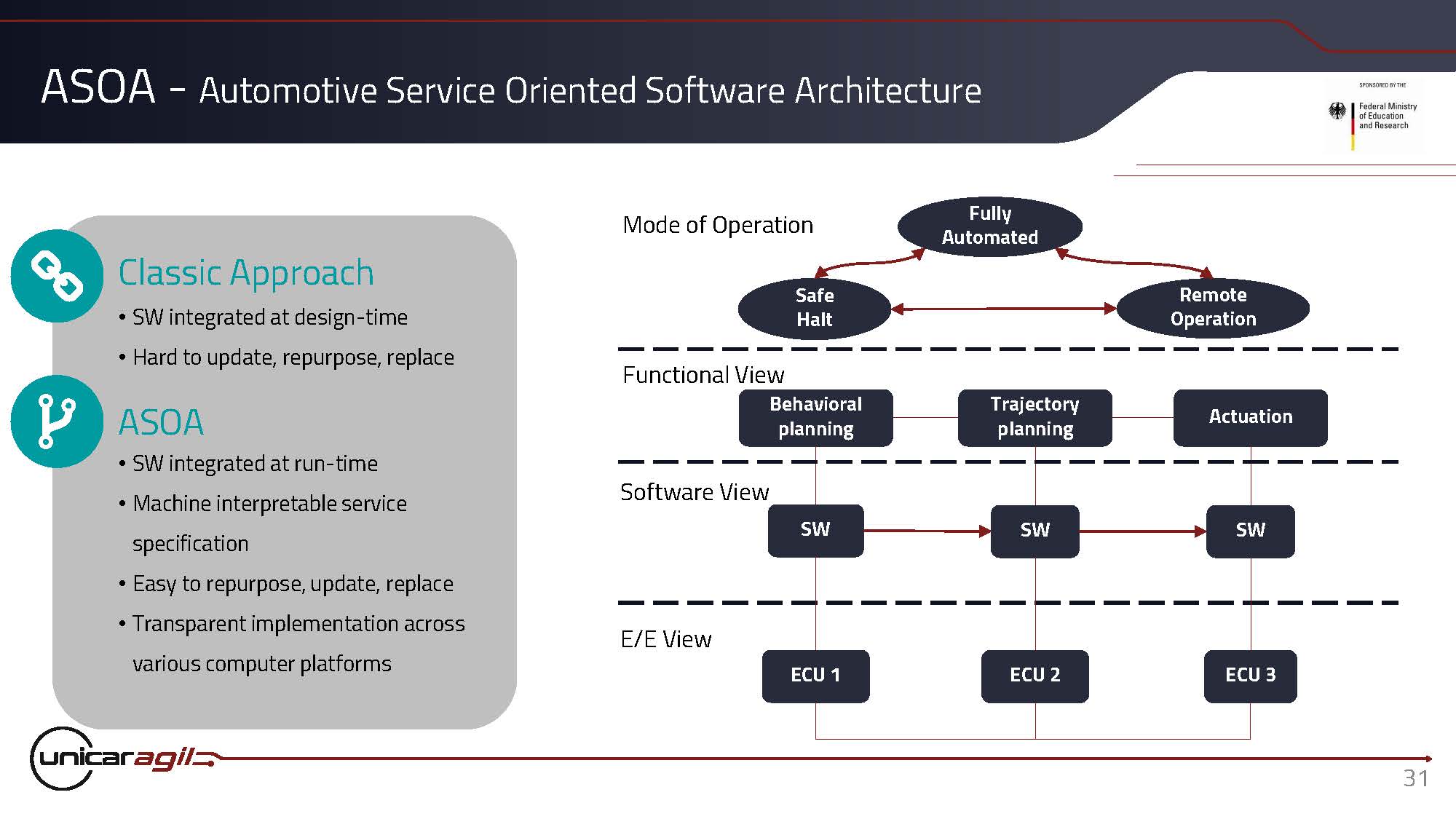
Eine steigende Komplexität der Software automatisierter Fahrzeuge verlangt nach der Möglichkeit, Softwarekomponenten einfach auszutauschen und zu aktualisieren. Die ASOA realisiert ein modulares Softwarekonzept, das die Ausführung von Softwarediensten in einem verteilten System auf heterogenen Rechnereinheiten – eingebetteten Systemen wie auch Hochleistungsrechnern – ermöglicht. Beispielsweise erfordert die Teleoperation durch die Leitwarte eine andere Dienstekomposition als der reguläre automatisierte Betrieb. Die benötigte Umkonfiguration der Software im laufenden Betrieb ist in der ASOA möglich. Dies ermöglicht außerdem eine einfache Erweiterung und Adaption für zukünftige Einsatzzwecke.
Leitwarte & Cloud
Leitwarte & Cloud
![[Bild: UNICARagil Leitwarte & Cloud]](/images/kerninnovationen/uncr-leitwarte-cloud.png)
Kooperative und kollektive Funktionen in der Cloud unterstützen die Fahrzeugautomatisierung. Eine Begleitung durch die Leitwarte stellt die ständige Verfügbarkeit sicher.
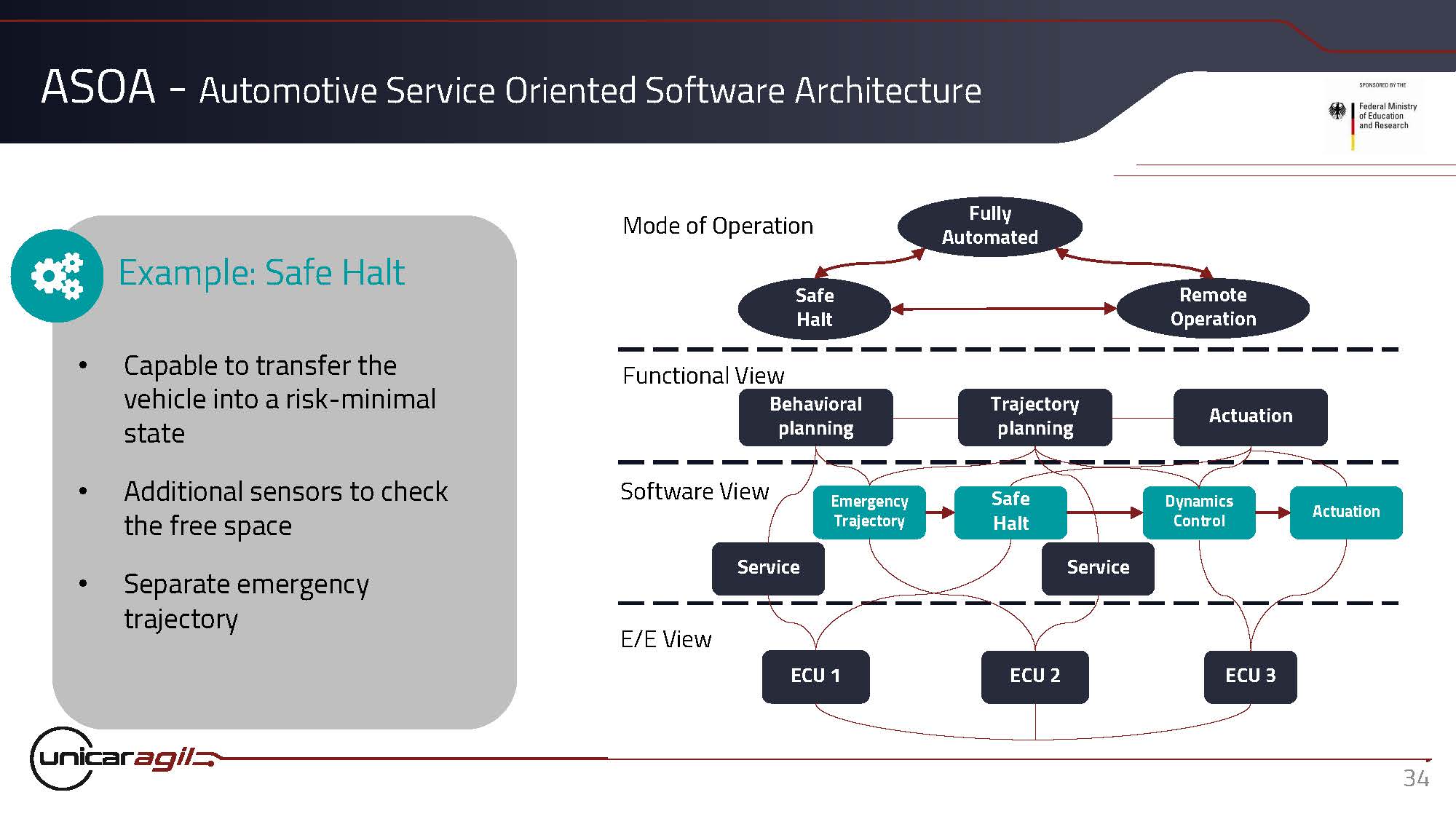
Das Vertrauen der Passagiere in die fahrerlosen Fahrzeuge muss jederzeit gewährleistet sein. Daher ist das Servicepersonal der Leitwarte rund um die Uhr erreichbar. Im Bedarfsfall kann das Fahrzeug jederzeit an einem sicheren Ort zum Stillstand kommen und die Fahrzeugsteuerung durch einen Teleoperator übernommen werden. So wird die ständige Verfügbarkeit sichergestellt und der Einsatzbereich der Fahrzeuge erweitert.
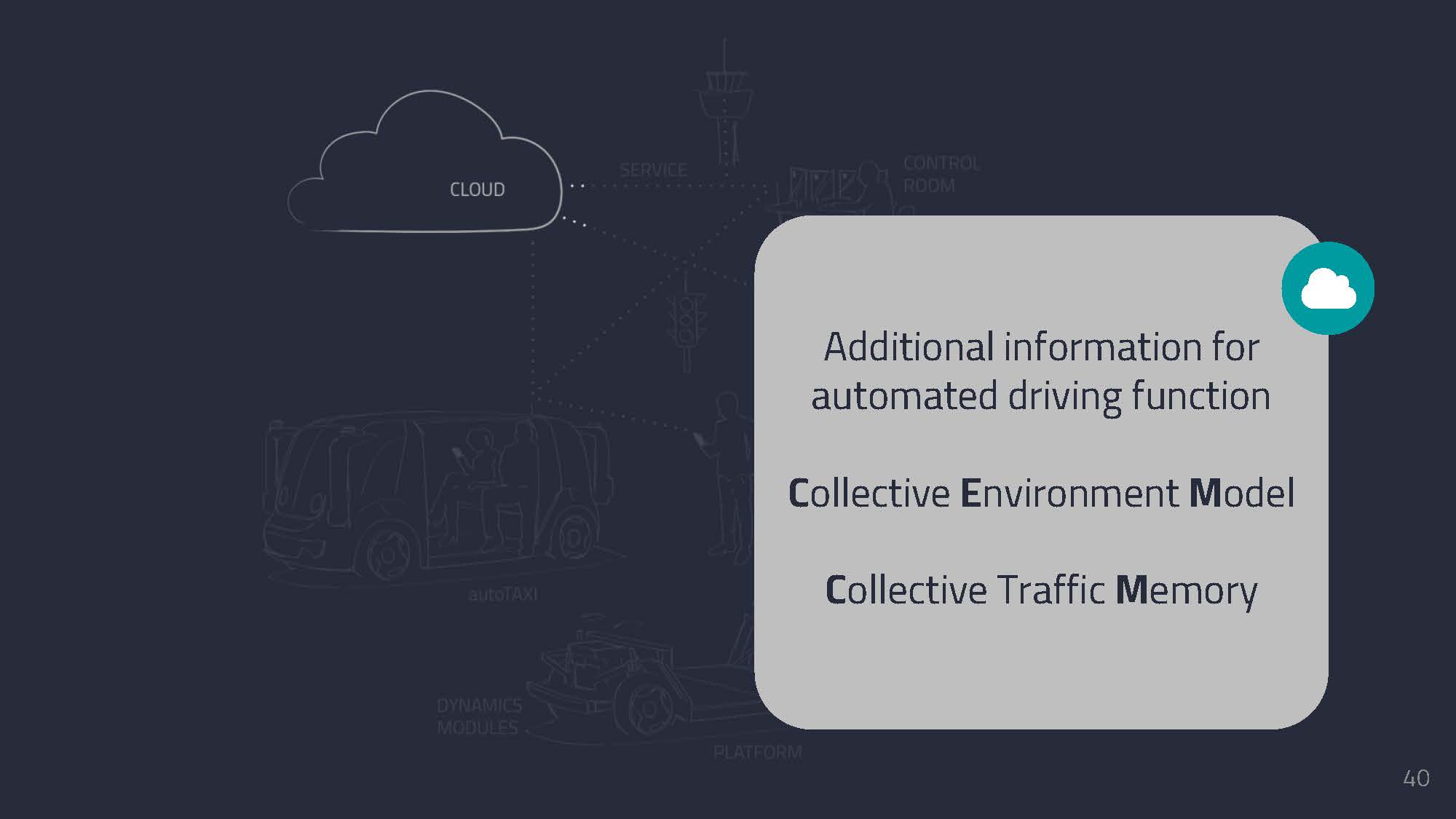
Durch eine gemeinsame Umfeldwahrnehmung in der Cloud wird die Kooperation der automatisierten Fahrzeuge ermöglicht. Die Info-Biene, ein sensortragendes Fluggerät, liefert Zusatzinformationen aus der Luft, wenn sie benötigt werden, und schafft so eine virtuelle Vorausschau. Unsere Fahrzeuge sollen immer besser werden: Ein kollektives Sammeln von Daten in der Cloud kann zur kontinuierlichen Analyse und Verbesserung von Algorithmen eingesetzt werden.
Safety & Security by Design
Safety & Security by Design
![[Bild: UNICARagil Safety & Security by Design]](/images/kerninnovationen/uncr-safety-security.jpg)
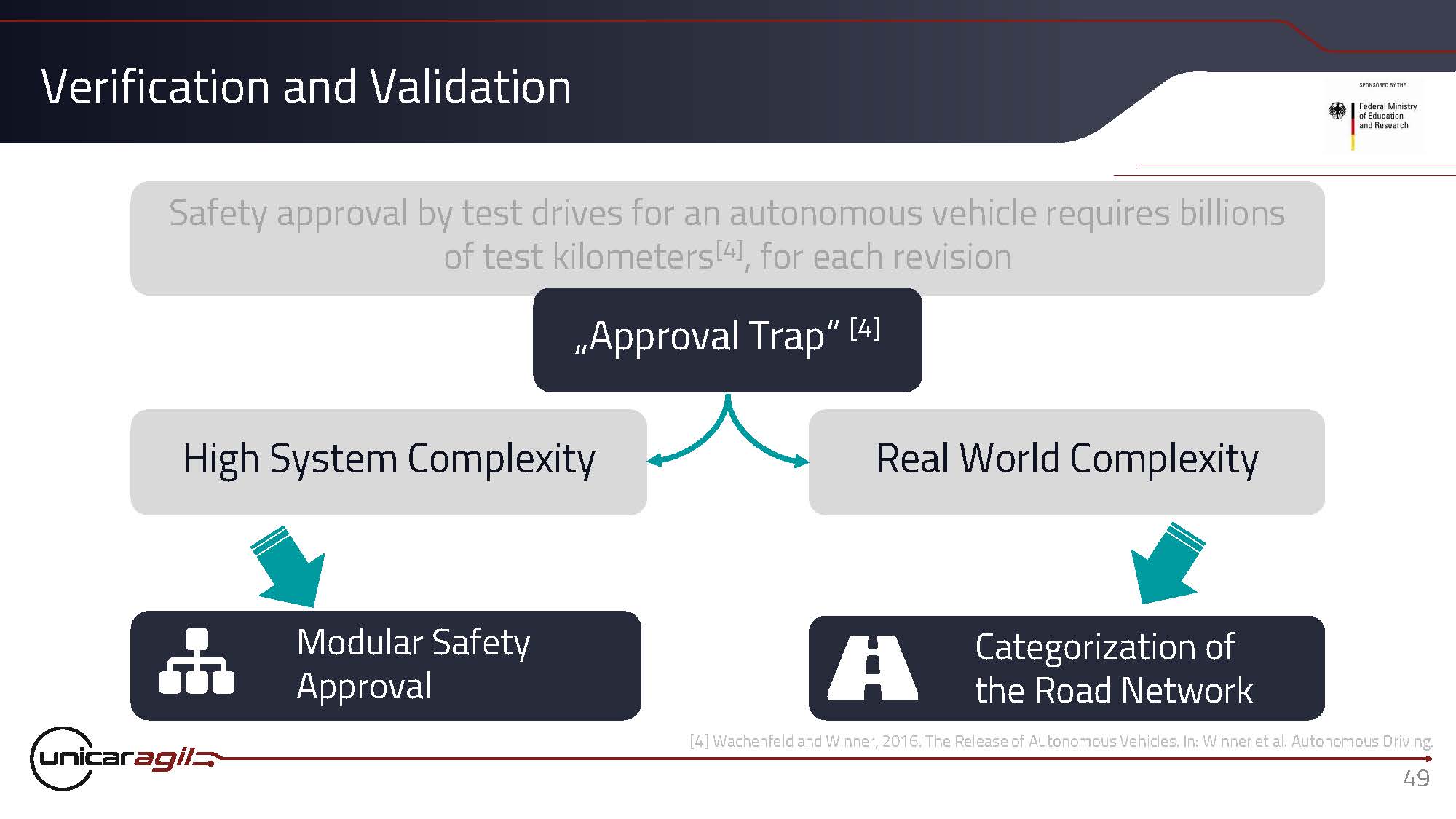
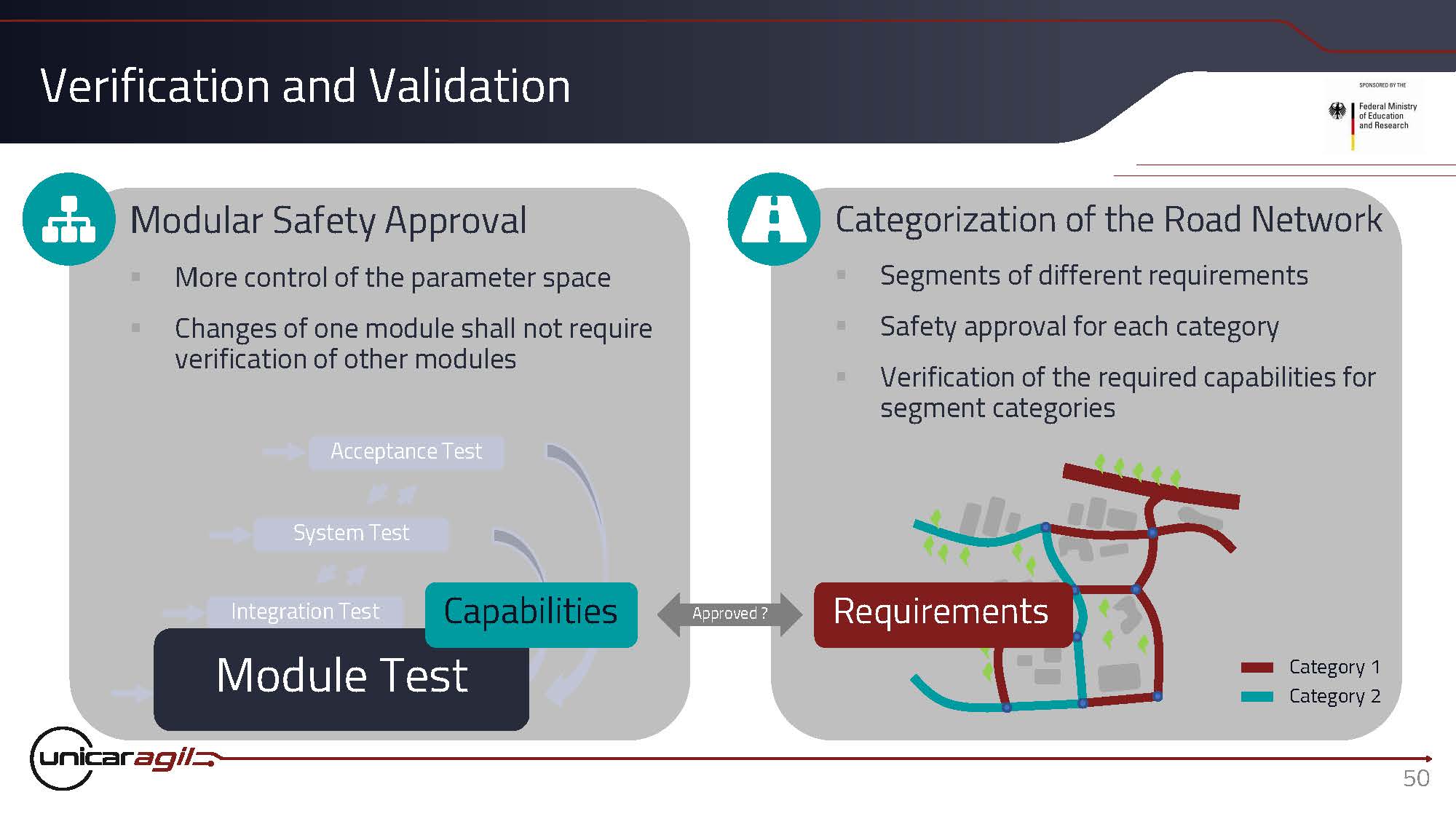
Safety & Security by Design: Durchgängige Sicherheitsorientierung von der Idee bis zur Freigabe
Es wird ein systemweites Safety- und Security-Konzept für die Fahrzeuge entwickelt und in Hardware und Software umgesetzt. Innovative und zentrale Bestandteile sind die Selbstwahrnehmung, die kontinuierlich die Fähigkeiten der Fahrzeuge bestimmt, und die Rückfallebene „Sicheres Anhalten“, die Fahrzeuge auch bei Defekten sicher in den Stillstand bringt und damit eine menschliche Rückfallinstanz ersetzt. Das modulare Absicherungskonzept ermöglicht, Teilsysteme unabhängig vom Gesamtsystem freizugeben und erleichtert so Austausch und Verbesserung einzelner Module. Ergänzt wird dies durch die Qualifizierung geeigneter Einsatzumgebungen auf Basis einer anforderungsbasierten Kategorisierung von Streckenabschnitten. Schließlich sind State-of-the-Art-Realisierung der Kernkomponenten des IT- und Energiebordnetzes sowie die diversitär-redundante Umfeldsensorik Teil des Safety- und Security-Konzepts.Das Konzept
Bitte klicken Sie auf ein Modul für mehr Informationen.
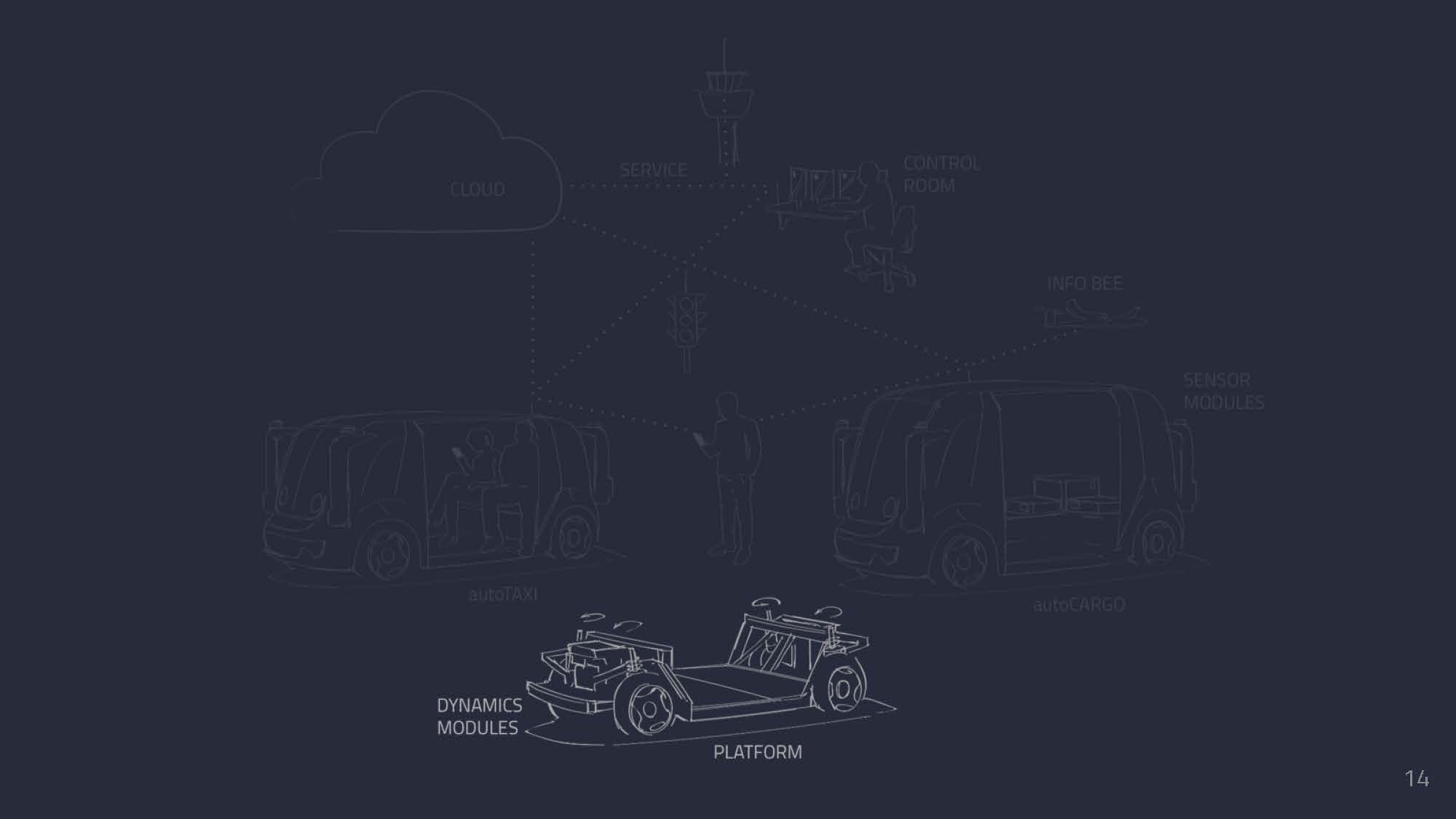
DIE DYNAMIKMODULE
Die Dynamikmodule bilden den wichtigsten Bestandteil für die eigentliche Bewegung der Fahrzeuge. An jeder Fahrplattform einer UNICARagil Fahrzeugausprägung sind vier nahezu identische Dynamikmodule angebracht. Diese haben die Aufgabe die von den verschiedenen Recheneinheiten vorgegebenen Trajektorien umzusetzen. Sie bilden also den direkten Kontakt zur Fahrbahn und sind für die Aufgaben des Lenkens, Antreiben und Bremsens zuständig. Jedes Dynamikmodul ist dabei individuell steuerbar und kann Lenkwinkel von bis zu 90° einstellen. Hierdurch lassen sich völlig neue Bewegungsformen im Straßenverkehr realisieren.
Dafür besteht ein Dynamikmodul aus den Aktuatoren für die Bewegung des Fahrzeugs und dem zugehörigen Steuergerät. Das Rad, die Federung, ein integrierter Radnabenmotor, die Reibbremse und ein Lenkungssteller bilden den mechanischen Teil des Moduls. Beide Elektromotoren haben eine eigene Leistungselektronik, die in der Fahrzeugplattform montiert ist. Darüber hinaus verfügt jedes Dynamikmodul über ein eigenes Steuergerät, welches gemeinsam mit den Steuergeräten der weiteren Dynamikmodule zum Rückenmark verschaltet wird. Auf diesem Steuergerät laufen sämtliche zugehörige Regelalgorithmen.
![[Foto: Timm Martens]](/images/personen/Martens_Timm_200x200.png)
Timm Martens
RWTH Aachen - ika
Alle Regelalgorithmen laufen auf einem Aurix Mikrocontroller mit FreeRTOS, hierbei kann sowohl in Simulink als auch direkt in C-Code implementiert werden. Zusätzlich wird eine Interface-Board entwickelt, das die Verbindung zum Rest des Fahrzeugs übernimmt, hauptsächlich durch den Einsatz von BroadR-Reach-Ethernet. Das Rückenmark kann auch über FlexRay und CAN kommunizieren, da nicht alle Prototypenkomponenten in den Fahrzeugen für den Einsatz von Ethernet vorbereitet sind.
Das Rückenmark repräsentiert die unterste Schicht in der mechatronischen Architektur. Während des Normalbetriebs empfängt es seine Eingänge vom Stammhirn, überprüft, ob sie im Bereich der aktuellen Fähigkeiten liegen und steuert die verschiedenen Aktuatoren. Zusätzlich liefert das Rückenmark ständig Informationen über seine eigenen Fähigkeiten für andere Dienste des Fahrzeugs. Im Falle eines Stammhirnversagens ist das Rückenmark in der Lage, die Signale direkt aus dem Großhirn zu empfangen und das Fahrzeug durch eine eigene Bewegungsstrategie zu steuern, um einer Trajektorienanforderung zu folgen. Während des Inbetriebnahmeprozesses steuert ein menschlicher Fahrer, der Pedale und einen Sidestick bedient, das Fahrzeug. Die Eingabeschnittstellen des Fahrers sind direkt mit dem Rückenmark verbunden, so dass das Fahrzeug auch ohne Stammhirn und Großhirn betrieben werden kann.
DIE PLATTFORM
Ein UNICARagil-Fahrzeug besteht grundsätzlich aus einer Plattform und einem Aufbaumodul. Das Aufbaumodul wird auf die Plattform aufgesetzt und an definierten Punkten fest verbunden. Die Plattform ist daher bereits ohne Aufbaumodul fahrfähig. Dies ist nur dank der integrierten Dynamikmodule sowie der im Boden verbauten Energieversorgung möglich. In UNICARagil werden zwei Plattformgrößen entwickelt, die sich für alle vier Fahrzeugausprägungen verwenden lassen. Schlüssel hierfür ist die hohe Skalierbarkeit und Modularität der Strukturen. Da die Fahrzeuge prototypisch aufgebaut und getestet werden, liegt bei der Entwicklung ein besonderes Augenmerk auf der strukturellen Sicherheit der Fahrzeuge. Die Plattformstruktur hat wesentlichen Anteil bei der Aufnahme entstehender Lasten.
In UNICARagil verschieben sich die Prioritäten der Anforderungen signifikant. Beispielsweise benötigen die Dynamikmodule wesentlich mehr Platz als in einem modernen Fahrzeug, da sich nur so die Lenkwinkel vergrößern lassen. Auf der anderen Seite soll die Raumausnutzung im Innenraum maximiert werden. Darüber hinaus muss der Einstieg in das Fahrzeug einfach sein und eine hohe Beförderungskapazität erreicht werden. Diese Anforderungen führen zu einer sehr flachen und schlanken Konstruktion, die gleichzeitig ausreichend steif ist, um einen sicheren Fahrbetrieb zu ermöglichen. Die entwickelte Plattformstruktur der UNICARagil-Fahrzeuge kann mit einem Skelett verglichen werden, das die tragende Rolle übernimmt. Neben der Sicherheit im Fahrbetrieb spielt auch die Sicherheit bei Unfällen eine entscheidende Rolle. Ziel ist es, mögliche Intrusionen bei Unfällen auf ein Minimum zu reduzieren. Um die kinetische Energie bei einem Unfall gezielt durch Verformung absorbieren zu können, kommen Crash-Management-Systeme zum Einsatz. Das mechanische Verhalten für unterschiedliche Betriebslasten, Misuse-Fälle und Unfallszenarien wurde eingehend mit dem Simulationsprogramm LS-DYNA untersucht und optimiert.
Timm Martens
RWTH Aachen - ika
Um die Skalierbarkeit umsetzen zu können, wird vor allem auf die Verwendung von Strangpressprofilen aus Aluminium gesetzt. Das ermöglicht eine einfache Skalierung durch die Verlängerung des Plattformmittelteils. Zusammen mit einer signifikanten Nutzung von Gleichteilen, lassen sich dadurch Skalierbarkeit und Modularität bestmöglich umsetzen. Um die Konstruktion möglichst leicht ausführen zu können, besteht sie zu einem großen Teil aus verschiedenen Aluminiumlegierungen sowie kohlenstofffaserverstärktem Kunststoff.
DIE AUFBAUMODULE
Die entwickelte Plattform wir durch das Energiebordnetz, die IT-Infrastruktur, das Thermomanagement sowie ergänzenden Packagekomponenten vervollständigt und bildet die Fahrplattform der 4 Fahrzeugausprägungen. Komplettiert durch eine skalierbare Hutstruktur und modulare Außenpanelle, Türsysteme und Sensormodule werde vier Fahrzeuge aufgebaut. Die Struktur erlaubt eine Skalierung der Fahrzeugabmaße in Länge und Höhe und somit eine Adaption an den jeweiligen Anwendungsfall. Im Rahmen des Projektes UNICARagil werden exemplarisch zwei verschiedene Größen aufgebaut. Auf Basis der großen Ausprägungen werden sowohl das autoSHUTTLE, Ersatz oder Ergänzung des öffentlichen Nahverkehres, als auch das autoCARGO, urbaner Verteilerverkehr, umgesetzt. Um auch für „MobilityOnDemand“ und den privaten Pkw passende Fahrzeuge anbieten zu können, wird die Karosserie in der Länge und der Höhe skaliert und zwei kleinere Derivate der UNICARagil Familie abgeleitet. Das autoTAXI und die autoELF.
![[Foto: Torben Böddeker]](/images/personen/boeddeker-torben-200x200.jpg)
Torben Böddeker
RWTH Aachen - ika
„Vom weißen Blatt Papier bis hin zum modularen Baukasten für autonome urbane Mobilität - In UNICARagil haben wir die einmalige Chance das Auto neu zu denken und nutzerzentrierte Mobilitätslösungen für den urbanen Raum von Morgen zu erschaffen. Vom persönlichen Chauffeur bis hin zum vollautomatisierten Paketzusteller.“
Im Kontrast zu aktuellen Privat- und Nutzfahrzeugen werden die Innenräume nicht um die Fahraufgabe herum gestaltet, sondern szenariobasiert speziell für den jeweiligen Anwendungsfall entwickelt. Die Nutzerbedürfnisse werden über Umfragen, Kreativworkshops und Beobachtungen in die frühe Konzeptentwicklung eingebunden und leisten über Zwischenaudits einen kontinuierlichen Beitrag zum Gestaltungsprozess. Die fehlende Fahraufgabe eröffnet vollkommen neue Möglichkeiten der Innenraumgestaltung, welche so bestmöglich genutzt werden sollen.
DIE SENSORMODULE
Alle Fahrzeugausprägungen verfügen über vier identisch ausgestattete Sensormodule, die an den Ecken der Fahrzeuge verbaut werden. Diese stellen sowohl mechatronisch als auch funktional ein eigenständiges Modul dar und tragen zu einem dienste-orientierten, streng modularen Architekturkonzept in Hardware und Software zur Realisierung vollständig automatisierter, fahrerloser Fahrzeuge für urbane Umgebungen bei.
Jedes der Sensormodule umfasst Radar-Sensorik, Lidar-Sensorik, monokulare und stereoskopische Video-Sensorik sowie eine zughörige Recheneinheit zur Sensordatenverarbeitung. Die Sensorik ist so ausgelegt, dass jedes Modul den horizontalen Sichtbereich von 270° um die jeweilige Fahrzeugecke mit jedem der verschiedenen Sensorprinzipien abdeckt. Die Recheneinheit verarbeitet die Daten aller zum Modul gehörigen Sensoren und berechnet daraus ein modulindividuelles Umfeldmodell. Dieses besteht aus einer Liste aller in der Umgebung des Fahrzeugs befindlichen dynamischen Objekte mit Information zum Objekttyp, zur geometrischer Ausdehnung und Position sowie zum aktuellen dynamischen Bewegungszustand des Objekts. Hinzu kommen Informationen über den befahrbaren Freiraum sowie eine komplementäre Darstellung des Umfeldes als Belegungsrasterkarte (Grid). Letztere unterteilt die Fahrzeugumgebung in quadratische Zellen, für die jeweils die Wahrscheinlichkeit ermittelt wird, ob die Zelle durch ein Objekt belegt ist oder nicht. Mithilfe der Kameras erfolgt zudem eine videobasierte Selbstlokalisierung des Fahrzeugs relativ zu einer hochgenauen Karte.
Die Umfeldmodelle der vier Sensormodule werden anschließend an das Großhirn kommuniziert, das dann die Fusion der Modelle zu einem widerspruchsfreien Gesamtumgebungsmodell realisiert. Dabei werden die Objekte zusätzlich zur hochgenauen digitalen Karte der Fahrzeugumgebung referenziert. Darauf aufbauend erfolgen dann die weiteren Interpretationsschritte zur automatisierten Bewegungsplanung des Fahrzeugs. Durch die überlappenden Sichtbereiche der einzelnen Sensormodule besteht eine zusätzliche Redundanz in der Wahrnehmung, sodass selbst bei komplettem Ausfall eines Sensormoduls eine Weiterfahrt möglich ist.
![[Foto: Michael Buchholz]](/images/personen/buchholz-michael-200x200.jpg)
Michael Buchholz
Universität Ulm - MRM
„Die Sensormodule für die vollständig automatisierten UNICARagil-Fahrzeuge ersetzen die Wahrnehmung des Fahrers in herkömmlichen Fahrzeugen. Sie sind mit Video-Kameras sowie RADAR- und LiDAR-Sensoren ausgestattet, um die Vorteile der verschiedenen Sensorprinzipien zu kombinieren. Die Redundanz gewährleistet zudem eine erhöhte Sicherheit in der Wahrnehmung. Mit Methoden der künstlichen Intelligenz und des maschinellen Lernens werden aus den Sensordaten die Umfeldmodelle für die weiteren Schritte der Automatisierung berechnet.“
Die Umfeldmodelle der vier Sensormodule werden anschließend an das Großhirn kommuniziert, das dann die Fusion der Modelle zu einem widerspruchsfreien Gesamtumgebungsmodell realisiert. Dabei werden die Objekte zusätzlich zur hochgenauen digitalen Karte der Fahrzeugumgebung referenziert. Darauf aufbauend erfolgen dann die weiteren Interpretationsschritte zur automatisierten Bewegungsplanung des Fahrzeugs. Durch die überlappenden Sichtbereiche der einzelnen Sensormodule besteht eine zusätzliche Redundanz in der Wahrnehmung, sodass selbst bei komplettem Ausfall eines Sensormoduls eine Weiterfahrt möglich ist.
DIE LEITWARTE
Die Leitwarte ist ein wesentlicher Bestandteil des Gesamtkonzeptes eines automatisierten Mobilitätsangebots.
Unabhängig vom Anwendungsfall haben Leitwarten im Wesentlichen drei Aufgaben. Zum einen steuern sie Systeme während unvorhergesehener Ereignisse. Zum anderen betreiben Leitwarten automatisierte Systeme und tragen folglich die Verantwortung für den Betrieb. Des Weiteren haben Leitwarten die Prämisse, den Nutzen des Systems zu steigern, indem Verzögerungen niedrig gehalten werden und Systemausfälle vermieden werden.
Im UNICARagil-Projekt werden diese Aufgaben auf das Mobilitäts- und Transportangebot einer automatisierten Fahrzeugflotte angepasst. Die Leitwarte fungiert als zentraler Ansprechpartner und wird aus einer Notfallzentrale, einem Servicearbeitsplatz und einem Teleoperationsarbeitsplatz bestehen.
![[Foto: Frank Diermeyer]](/images/personen/diermeyer-frank-200x200.jpg)
Frank Diermeyer
Technische Universität München - FTM
„Mit UNICARagil wird erstmals das Teleoperierte Fahren ein fester Konzeptbestandteil beim Betrieb von automatisierten Fahrzeugflotten. Der Wirkbereich der Leitwarte wird dadurch vergrößert und somit erhöht sich massiv die Verfügbarkeit und Leistungsfähigkeit des gesamten Mobilitätssystems.“
Die Teleoperation ist ein Forschungsschwerpunkt am Lehrstuhl für Fahrzeugtechnik der TU München. Vom Teleoperationsarbeitsplatz aus behebt die Leitwarte fahrzeugseitige Probleme ohne Servicepersonal vor Ort. Erwartete, fahrzeugseitige Probleme sind zum Beispiel technische Defekte an Hardware und Software. Bei technischen Defekten manövriert der Teleoperator mit der verbleibenden Sensorik und Aktorik das Fahrzeug an einen geeigneten Ort. Je nach Art des technischen Defektes werden fahrzeugseitige Automatisierungsdienste genutzt, um den Teleoperator bei seiner Aufgabe zu unterstützen. Ein weiteres Problem ist die situative Überschreitung von Systemgrenzen der Fahrzeugautomatisierung. Das Fahrzeug erkennt die Überschreitung selbst, beendet die automatisierte Fahrt und meldet sich bei der Leitwarte. Der Teleoperator entscheidet über die Vorgehensweise zur Überwindung der Systemgrenze und bringt das Fahrzeug in einen Zustand, von dem aus es selbständig weiterfahren kann.
Der Servicearbeitsplatz managet den Betrieb der Fahrzeugflotte. Zunächst hat er den Überblick über den Zustand der Fahrzeuge. Weiter kann er den Fahrzeugen im Bedarfsfall Routen zuweisen oder aktuelle Routen modifizieren. Darüber hinaus hat er Zugriff auf die Fahrpläne der Fahrzeuge und kann die für das Routing verwendeten Segmente modifizieren, um eine Navigation durch zeitweise gesperrte Straßen zu verhindern.
Die Notfallzentrale nimmt Notrufe von Passagieren und dringende Mitteilungen von anderen Leitstellen entgegen.
DIE CLOUD
Zukünftige Fahrzeuge werden nicht nur automatisiert sein. Sie sind zusätzlich untereinander und mit unterstützender Infrastruktur vernetzt. Gemeinsam bilden sie ein Cooperative Intelligent Transport System (C-ITS). Beim Entwurf eines solchen C-ITS werden verschiedene Ziele verfolgt. An erster Stelle steht immer das Ziel, die Sicherheit aller Verkehrsteilnehmer zu erhöhen. Des Weiteren kann die Effizienz der Mobilität damit gesteigert werden. Wenn weitere Formen der Kooperativität möglich werden, kann die Verkehrseffizienz steigen. Menschen und Güter gelangen schneller und zuverlässiger an ihr Ziel. Dies kann sich wiederum positiv auf die Effizienz bezüglich der Nutzung von Ressourcen auswirken. Insbesondere natürliche Ressourcen, welche die Energie bereitstellen, die zum Aufbau, Erhalt und Betrieb des C-ITS eingesetzt werden, können eingespart werden.
Bisher waren die Datenmengen, die von Fahrzeugen über drahtlose Netzwerke mit anderen geteilt wurden, relativ klein, weil Kommunikationstechnologie wie LTE (4G) für bestimmte Funktionalitäten unzureichend ist. Automatisiertes Fahren erfordert sehr kleine Latenzen und eine hohe Zuverlässigkeit. Die Verhaltensentscheidungen eines Fahrzeugs müssen auf aktuellen Daten basieren, sonst können wichtige Elemente im Umfeld des Fahrzeugs übersehen werden. Mit dem Aufkommen neuer Kommunikationstechnologie wie 5G entstehen neue Möglichkeiten, da mehr Anforderungen erfüllt werden können. Falls man weitere aufstrebende Technologien wie das Maschinelle Lernen und Cloud-Computing hinzuzieht, ermöglicht dies einen großen Fortschritt bzgl. der Fähigkeiten von automatisierten Fahrzeugen, die Teil eines C-ITS sind. In UNICARagil werden diese neuen Möglichkeiten erforscht.
![[Foto: Bastian Lampe]](/images/personen/lampe-bastian-200x200.jpg)
Bastian Lampe
RWTH Aachen - ika
„Zukünftige Fahrzeuge sind nicht nur automatisiert, sondern auch vernetzt. Hierdurch ist eine effektive Kooperation möglich, die den Verkehr effizienter und sicherer machen kann. Wir entwickeln mit der UNICARagil Cloud ein Framework, innerhalb dessen Fahrzeuge ihr Umfeld gemeinsam wahrnehmen und verstehen können. Aufgrund einer sich permanent wandelnden Welt setzen wir maschinelle Lernverfahren ein, die eine automatische Anpassung und Bewertung der eingesetzten Algorithmen ermöglichen.“
Die Komponenten im UNICARagil Cloud-Konzept ermöglichen:
- Kollektive Umfeldwahrnehmung mehrerer Verkehrsteilnehmer,
- Gegenseitige Verifikation der Umfeldwahrnehmung von Verkehrsteilnehmer,
- Lernen aus großen Datenmengen, die kontinuierlich in der Cloud gesammelt werden,
- Kollektive Routenplanung und Trajektorienoptimierung.
Diese Funktionen werden in den Softwarekomponenten Kollektives Umfeldmodell, Kollektives Gedächtnis und Kollektives Verhalten umgesetzt. Diese werden auf Cloud-Servern ausgeführt und unterstützen die automatisierten Fahrzeuge, die in UNICARagil entwickelt werden.
DIE DIENSTEORIENTIERUNG
Softwarekomponenten in dienstorientierten Architekturen sind als lose gekoppelte Dienste implementiert, deren Zusammenspiel zur Laufzeit dynamisch festgelegt wird. Im Gegensatz zu herkömmlichen Architekturen in heutigen Fahrzeugen, in denen Abhängigkeiten zwischen Komponenten schon zur Entwicklungszeit fest verankert sind, erlaubt es unsere Architektur, Komponenten auszutauschen, zu aktualisieren oder anderweitig zu verwenden. Die Entscheidung über die Integration der Komponenten obliegt einem Orchestrator, der situationsabhängig zur Laufzeit die beste Systemkonfiguration ermittelt und einstellt. Da Entscheidungen zur Systemintegration nicht Teil der einzelnen Softwarekomponenten sind, wird die Austauschbarkeit und Wiederverwendbarkeit der Softwarekomponenten gewährleistet. Das von uns erarbeitete Konzept wird implementiert und soll auf den Steuergeräten aller Fahrzeugvarianten zum Einsatz kommen. Die Ausgestaltung der verschiedenen Architekturebenen unterstützen wir durch ein kollaboratives, Web-basiertes Tool zur Architekturbeschreibung.
![[Foto: Bassam Alrifaee]](/images/personen/Alrifaee_Bassam_200x200.jpg) Bassam Alrifaee
Bassam Alrifaee
RWTH Aachen - i11
„Die heutige Softwareentwicklung in der Automobilindustrie folgt Paradigmen, die nur bedingt zu den schnellen Lebens- und Entwicklungszyklen automatisierter und vernetzter Fahrzeuge passen. Wir forschen an einer streng modularen dienstorientierten Architektur, die durch ihre flexible Integration und Updatefähigkeit der Grundstein für eine agile Entwicklung wird.“
DIE SICHERHEIT
Für den automatisierten Betrieb von Fahrzeugen im öffentlichen Straßenverkehr ergeben sich höchste Sicherheitsansprüche. In konventionellen Fahrzeugen, die mit Assistenzsystemen bis SAE Level 2 ausgerüstet sein können, ist der menschliche Fahrer die zentrale Instanz um Sicherheit zu gewährleisten. Der Fahrer ist verantwortlich, die Fahrt permanent zu überwachen und im Zweifel die Führung des Fahrzeugs zu übernehmen. In Fahrzeugen höherer Automatisierungsgrade entfällt die Überwachung durch den Menschen, entsprechend werden sämtliche Sicherheitsaufgaben, die vorher durch den Menschen übernommen wurden, nun durch das technische System realisiert.
Sicherheit ist somit eine der Schlüsselvoraussetzung für die geplante Einführung von SAE-Level-3+-Fahrzeugen im öffentlichen Straßenverkehr. Diese Disruption macht durch den Wegfall eines menschlichen Fahrers oder Überwachers eine öffentliche Diskussion über das zu erreichende Sicherheitsniveau notwendig. Gleichzeitig ist das Thema Sicherheit in der Automatisiertes-Fahren-Community unterrepräsentiert. Firmen betrachten ihre Ansätze in diesem Bereich zudem als Betriebsgeheimnis und publizieren nur teilweise.
![[Foto: Torben Stolte]](/images/personen/stolte-torben-200x200.jpg)
Torben Stolte
TU Braunschweig - LfR
„Für die beabsichtigte Einführung fahrerloser Fahrzeuge in den öffentlichen Straßenverkehr ist Sicherheit vermutlich die zentrale Herausforderung. Gleichzeitig ist unklar, welches Sicherheitsniveau fahrerlose Fahrzeuge erreichen müssen. UNICARagil bietet die Möglichkeit Sicherheit systematisch auf allen Ebenen der Fahrzeugautomatisierung zu betrachten. Wir können Fragen aufwerfen, sie aus verschiedenen Perspektiven betrachten sowie Lösungsansätze präsentieren. Damit liefert UNICARagil einen wichtigen Beitrag zur Diskussion der Sicherheit automatisierter Fahrzeuge sowohl in der Forschung als auch in der Öffentlichkeit.“
In UNICARagil wird Sicherheit als integraler Bestandteil der Forschung und Entwicklung betrachtet. Ziel ist es eine öffentlich verfügbare Referenz für die Entwicklung sicherer automatisierter Fahrzeuge zu schaffen. Darüber hinaus ist es das Ziel, am Projektende eine sichere fahrerlose Demonstration der Fahrzeuge zu gewährleisten. Gleichzeitig sollen mit den Arbeiten der wissenschaftliche Austausch zur Sicherheit automatisierter Fahrzeuge vorangebracht werden.
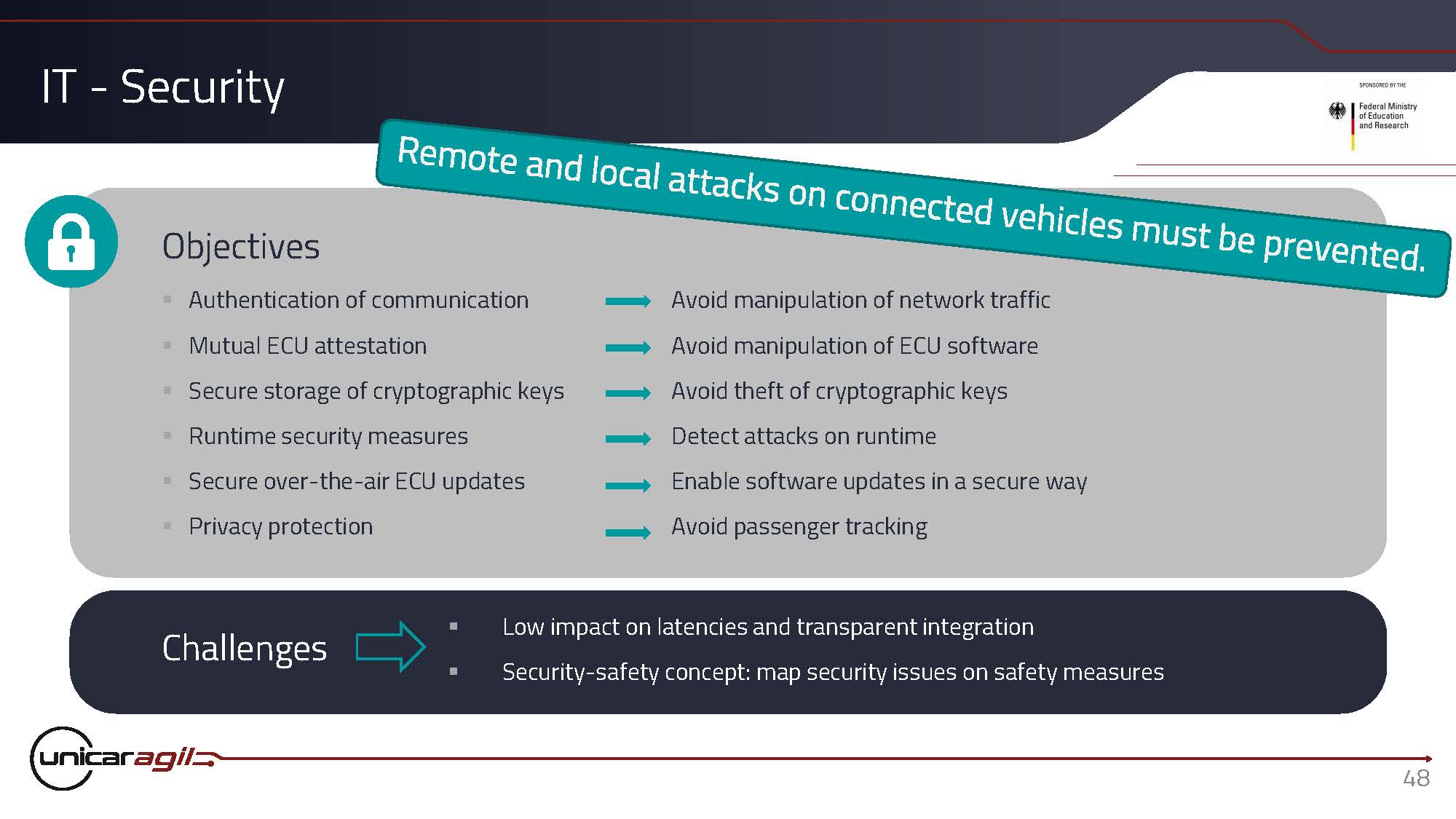
Die Forschung in der Domäne „Sicherheit“ in UNICARagil konzentriert sich auf zahlreiche Aspekte. Ein erster Schwerpunkt ist die systematische Sicherheitskonzeption der zu entwickelnden Funktionen im Umfeld einer stark parallelisierten Entwicklung wie im Projekt UNICARagil. Innovative Aspekte der Sicherheitskonzeption sind Untersuchungen zur Einführung einer Rückfallebene, die das Fahrzeug im Falle von Degradationen in einen risikominimalen Zustand überführt, sowie die durchgehende Bestimmung der Gesamtsystemgesundheit zur Laufzeit, die als wichtige Eingangsgröße der Entscheidungsfindung der Fahrzeuge dient. Zudem werden technische Sicherheitskonzepte für die modularen Aktormodule und die E/E-Architektur entwickelt sowie eine systematische Timing-Analyse der gesamten Verarbeitungskette von Umfeldsensorik hin zur Aktorik durchgeführt. Weitergehend werden Aspekte der IT-Security sowie deren Verknüpfung mit den zuvor genannten Safety-Aspekten betrachtet. Zusätzlich erfolgt eine Betrachtung der Gebrauchssicherheit, die einen Fokus auf die sichere Interaktion von Mensch und Fahrzeug legt.
DIE INFO-BIENE
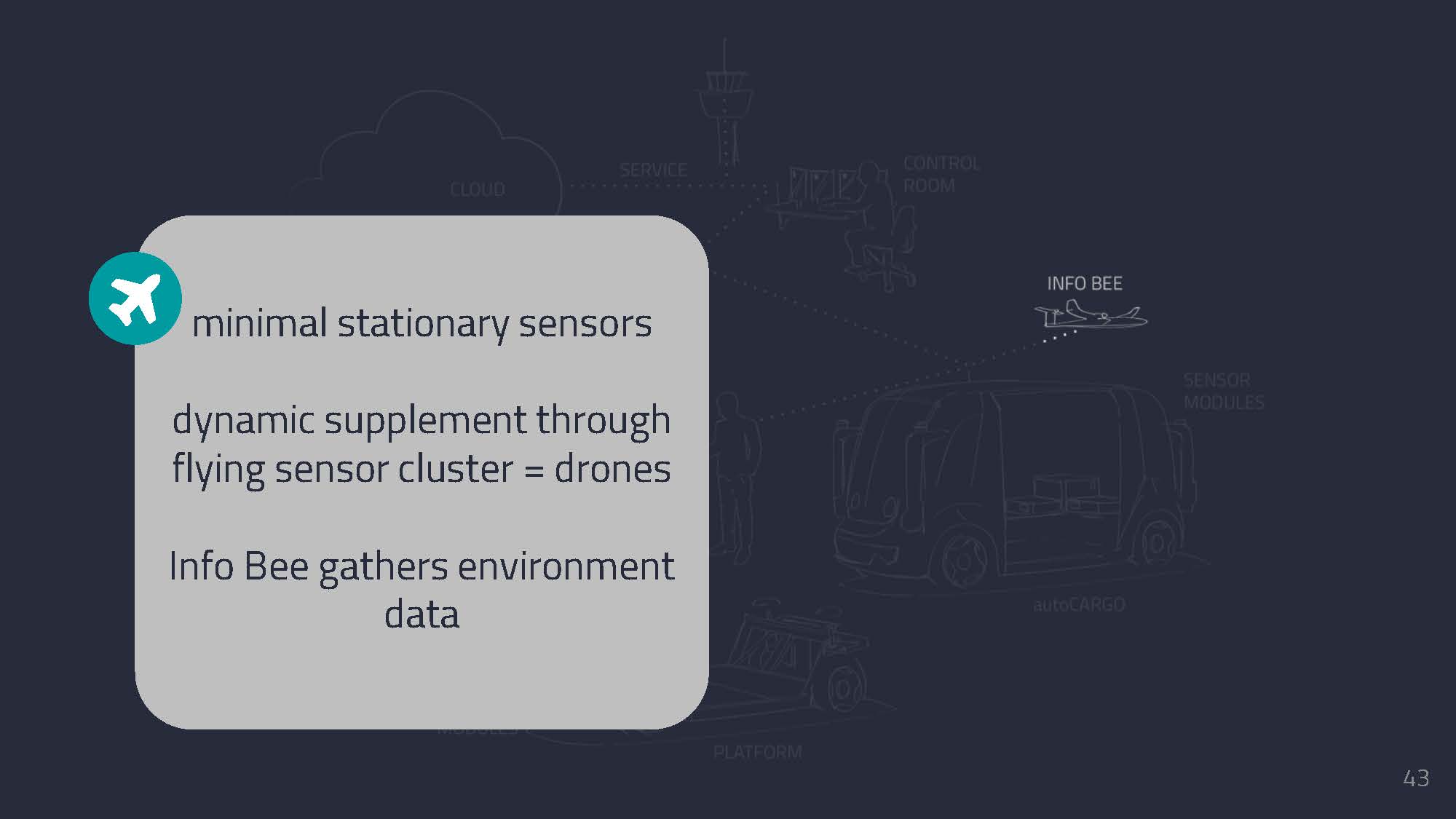
Drohnen dienen im Projekt UNICARagil als fliegende Sensorplattformen zur Ergänzung des externen Fahrzeugumfeldmodells. Eine wesentliche Voraussetzung für Verhaltensentscheidungen von automatisierten Fahrzeugen ist die Kenntnis des Fahrzeuges über das Fahrzeugumfeld, sowie eine Vorhersage des Verhaltens anderer Verkehrsteilnehmer in der näheren Umgebung. Das Umfeldmodell wird dabei aus den Informationen von Fahrzeugsensoren, aus digitalen Karten und aus weiteren Datenquellen zu einem dynamischen Gesamtbild der Umgebung zusammengesetzt. Auf Grundlage dieses Gesamtbilds kann anschließend eine Verhaltensentscheidung getroffen werden.
Zusätzlich zu Sensoren im Fahrzeug werden im Projekt UNICARagil auch externe Sensoren für die Erstellung des Umfeldmodells genutzt. Diese Sensoren können auf Gebäuden, Infrastruktur und auch Drohnen platziert werden. Die fliegende und mit Sensoren ausgestattete Drohne kann dabei durch ihre Vogelperspektive auch Situationen zu erfassen, die für Fahrzeuge am Boden, z. B. aufgrund von Sichthindernissen, nur eingeschränkt oder gar nicht erkennbar sind. Darüber hinaus kann sich die Drohne unabhängig vom Fahrzeug und von der Verkehrslage bewegen. So können z. B. Verkehrshindernisse im Voraus erkannt und vom Fahrzeug frühzeitig in Verhaltensentscheidungen berücksichtigt werden, lange bevor das Fahrzeug das Hindernis erreicht.
![[Foto: Norbert Siepenkötter]](/images/personen/siepenkoetter-norbert-200x200.jpg)
Norbert Siepenkötter
RWTH Aachen - FSD
„Das Blickfeld von fahrzeugeigenen Sensoren ist auf die Bodenperspektive beschränkt. Externe, z.B. an Gebäuden montierte Sensoren können hier wertvolle Zusatzinformationen liefern. Die in UNICARagil entwickelten, hochautomatischen Fluggeräte erlauben darüber hinaus ganz gezielt und bedarfsgesteuert den „Blick von Oben“ an praktisch jedem beliebigen Ort.“
Um der Forderung nach vertikaler Start- und Landefähigkeit bei gleichzeitig hoher Reichweite gerecht zu werden, basiert die Drohne auf einem Flugsystem mit Kippflügeltechnik. Dieses Flugsystem, welches im Normalflug einem leistungsfähigen, klassischen Flugzeug entspricht, kann durch Verdrehung des Tragflügels und einer damit verbundenen Verdrehung der Antriebsmotoren senkrecht Starten und Landen. Der gesamte Flug samt Datenerfassung der Drohne erfolgt automatisiert und wird von einer Bodenstation aus überwacht. Alle gesammelten Daten werden automatisch in einer Cloud, die ebenfalls Teil des Projekts UNICARagil ist, verarbeitet und gespeichert.
Die Autos
- autoTAXI
- autoELF
- autoSHUTTLE
- autoCARGO
![[Sketch: autoTAXI]](/images/prototypes/2020-05_auto-taxi.jpg)


Das autoTAXI ist agil und passt genau zu den Bedürfnissen seiner Nutzer. Die verschiedenen Mottotaxis bieten für jeden Reisegrund das passende Innenraumkonzept.
Studien zu autonomen Fahrzeugen zeigen, dass sich die Nutzer dieser Fahrzeuge während der Fahrt wünschen, Nebentätigkeiten nachkommen zu können. Diese Aussage lässt sich in vollem Umfang auf autonome Taxis übertragen. Zusätzlich werden Taxis einen deutlich größeren Teil der Mobilität der Menschen darstellen, da sie über beispielsweise Apps sehr einfach überall hin gerufen werden können.
Diese einfache agile Bestellung des benötigten Taxis ermöglicht eine Flotte von Mottotaxis, die für die Bedürfnisse während der anstehenden Fahrt perfekt ausgestattet sind. Vorstellbar sind zahlreiche Innenraumkonzepte von Schlaftaxis über Partytaxis bis zu Touristentaxis. Das autoTAXI, welches im Projekt umgesetzt wird, ist ein „working taxi“. Es wird auf die Bedürfnisse von Geschäftsleuten umfänglich angepasst sein. Sowohl Schreibtischarbeiten einer einzelnen Person als auch Besprechungen sollen durch die entsprechende Innenraumtopologie und unterstützende „interior Human Machine Interfaces“ (iHMI) möglich sein. autoTAXI zeigt also nur eine von vielen Varianten und regt die Fantasie an, sich weitere mögliche Mottotaxis einer gesamten Flotte vorzustellen, die in ihrer Gesamtheit unseren Bedürfnissen der Mobilität von morgen angepasst wird.
![[Sketch: autoELF]](/images/prototypes/2020-05_auto-elf.jpg)

Die autoELF repräsentiert ein vollständig individuelles und privates Familienfahrzeug. Mit seinem zugänglichen und inklusiven Design können alle Familienmitglieder ihre Reisen uneingeschränkt genießen.
Die autoELF ist ebenso wie das autoTAXI eine kleinere Fahrzeugausführung und wird mit dem Ziel entwickelt, möglichst vielen Mitgliedern einer Familie individuelle Mobilität zu ermöglichen und den jeweiligen Bedürfnissen während der Fahrt nachzugehen. Die Bedürfnisse der einzelnen Familienmitglieder können dabei sehr unterschiedlich sein. Besonders hohe Anforderungen stellen diejenigen, die bei der Nutzung eines konventionellen Fahrzeugs auf die Unterstützung einer fahrtüchtigen Begleitperson angewiesen sind. Mögliche Anwendungen sind beispielsweise die Fahrt der Großeltern zu einem Arzttermin oder die der Kinder zum Sportverein. Auch körperlich beeinträchtigte Menschen können so in Zukunft barrierefrei mobil sein. Auf eine bislang erforderliche Begleitperson kann dabei zukünftig verzichtet werden. Hierdurch verhilft die autoELF ihren Anwendern zu neuer Autonomie im Alltag. Eine edel anmutende Außengestaltung und ein wohnlicher Innenraum, der den vielfältigen Bedürfnissen seiner Nutzer angepasst ist, runden das Konzept des autonomen Familienfahrzeugs ab. Individualität steht hier im Vordergrund.
![[Sketch: autoSHUTTLE]](/images/prototypes/2020-05_auto-shuttle.jpg)


Das autoSHUTTLE bietet bis zu acht Personen Platz und ist Teil eines neuen, verbesserten öffentlichen Nahverkehrssystems. Jederzeit optimal an die Bedürfnisse der Nutzer angepasst, stellt es das öffentliche Verkehrsmittel der Zukunft dar.
Durch ein intelligentes Routing-System sollen die Fahrzeiten im öffentlichen Nahverkehr verkürzt werden. Dabei werden die Routen der einzelnen Fahrzeuge in einem festen Haltestellennetz so geplant, dass die Start- und Zielwünsche der Passagiere sinnvoll und gleichzeitig effizient angefahren werden. Durch die Abkehr von festen Fahrplänen und Streckennetzen wird die jeweils kürzeste und schnellste Route für die aktuellen Passagiere gewählt. Auch das Interieur der Fahrzeuge wird sich an die aktuellen Gegebenheiten anpassen. Während bei geringem Fahrgastaufkommen sechs Passagiere bequem sitzend Platz finden, kann der Innenraum transformiert werden, um andere Nutzungsszenarien zu ermöglichen. Bis zu drei Sitzplätze werden verstaut, um die frei werdende Fläche in der Rush Hour als Stehplätze nutzen zu können und die Kapazität des Fahrzeugs auf acht Personen zu erhöhen. Dieser Bereich kann außerdem genutzt werden, um sperriges Gepäck zu transportieren, die Fahrradmitnahme zu ermöglichen oder einer Rollstuhlfahrerin/einem Rollstuhlfahrer Platz zu bieten. Das Human Machine Interface (HMI) wird mit dem Ziel entwickelt, das Vertrauen in automatisierte Fahrzeuge und den Umgang mit diesen zu optimieren. Der Wegfall des Fahrers als menschliche Instanz wird durch eine intuitive Interaktion und ein vorhersehbares Verhalten kompensiert.
![[Sketch: autoCARGO]](/images/prototypes/2020-05_auto-cargo.jpg)


Das autoCARGO veranschaulicht unser automatisiertes Abhol- und Lieferfahrzeug. Mit seinem effizienten Lagersystem bringt es Ihre Sendung auf das nächste Level.
Das Empfangen und Versenden von Paketen wird durch das autoCARGO unabhängig von der Anwesenheit seiner Kunden. AutoCARGO fährt und liefert autonom und elektrisch, ist lokal emissionsfrei und für urbane Räume ausgelegt. Dabei können private und öffentliche Paketboxen vollautomatisiert angefahren und bedient werden. Die gewünschte Paketbox lässt sich für jede Sendung individuell in der zugehörigen APP einfach und flexibel festlegen. Vernetzt mit anderen Fahrzeugen und Informationssystemen kann auf Verkehrsstörungen flexibel reagiert werden. Die Akkus werden im Paketzentrum selbständig induktiv geladen. Wie auch die übrigen Fahrzeuge autoSHUTTLE, auto- TAXI sowie autoELF, ist auch das autoCARGO modular aufgebaut. Von dem Anwendungsfall autoSHUTTLE unterscheidet sich autoCARGO durch das Interieur. Statt des variablen Innenraumes für bis zu acht Personen ist es mit einer Handhabungstechnik für Pakete und einem Lagerraum ausgestattet. Dabei werden die Pakete mit einem speziellen Gelenkarmroboter sicher ein- und ausgeliefert. Im wechselbaren Ladecontainer werden die Pakete gestapelt und können so im Paketzentrum in kurzer Zeit ent- und beladen werden.